【泡泡点云时空】点云中未知类型二次曲面的一种极简检测方法(CVPR2018-18)
泡泡点云时空,带你精读点云领域顶级会议文章
文章标题:A Minimalist Approach to Type-Agnostic Detection of Quadrics in Point Clouds
作者:Tolga Birdal, Benjamin Busam, Nassir Navab, Slobodan Ilic, Peter Sturm
来源:IEEE Conference on Computer Vision and Pattern Recognition (CVPR),2018
播音员:Crystal
编译:赵林
审核:郑森华
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文提出了一种无分割,自动且有效的方法来检测点云中的一般几何二次曲面,在这种情况下,杂波和遮挡是不可避免的。我们的日常世界由人造物体主导,这些物体使用3D基元(例如平面,圆锥体,球体,圆柱体等)设计而来。这些对象在工业环境中也无所不在。这使得通过基元抽象3D场景成为可能,从而将这些几何形状定位为感知和高级3D场景理解的组成部分。与最先进的技术相比,定制的算法可以分别处理每种基元类型,我们提出将所有类型封装在单个稳健的检测过程中。我们的方法的核心是一个封闭形式的3D二次曲面拟合,在原始空间和对偶空间中运行,并且至少需要4个定向点。围绕这一点,我们设计了一种新颖的局部零空间投票策略,将4点情况减少到3。投票与著名的RANSAC相结合,使我们的算法比传统算法快几个数量级。这是第一种能够在困难的场景中执行通用的交叉型多对象基元检测的方法。合成和真实数据集上的实验结果证明了我们方法的有效性。
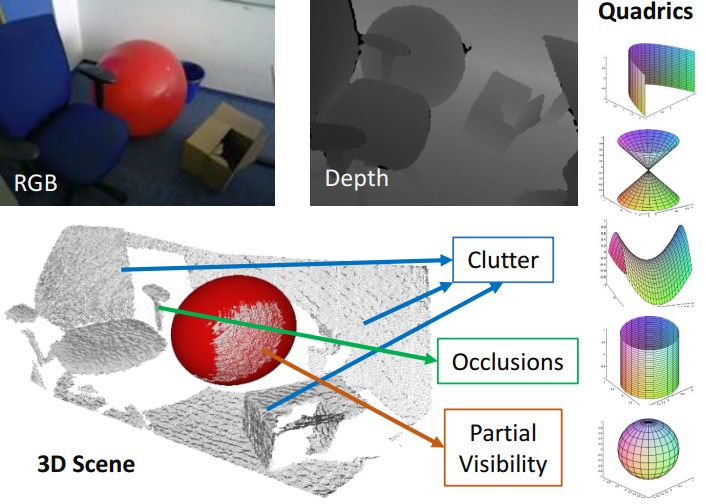
图1:我们的算法可快速检测遮挡,局部可视和杂波条件下点云的二次曲面。请注意,该算法不知道球体是否存在,并且能够仅使用3D几何体来检测合理的基元。
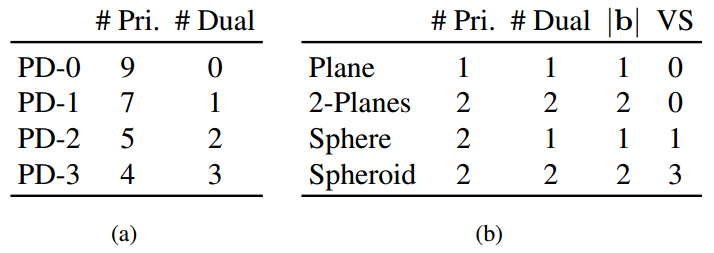
图2:(a)在原始空间(P)和对偶空间(D)中的最小拟合约束数,PD=i是指第i个组合。(b)各种二次曲面的最小约束数和投票空间大小。
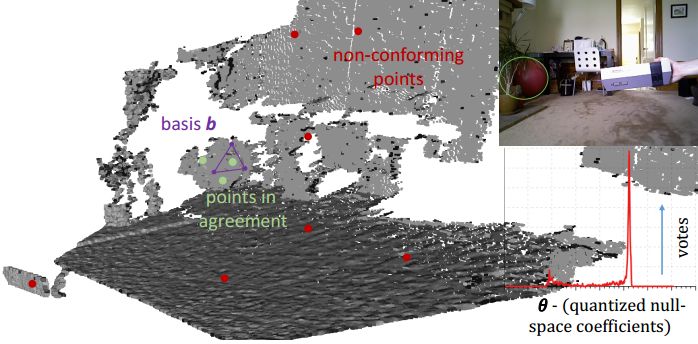
图3:一旦一个基元被随机假设,我们就会通过在空间上投票来寻找同一表面上的点。寻找的普拉提球(可能是二次型)被标记在图像上,下面是KDE相应的填充积分器。
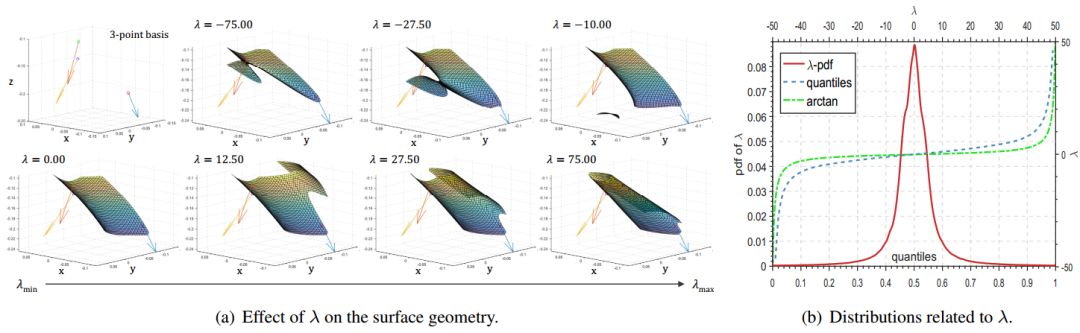
图4:λ的特性,(a)我们计算了固定基的零空间分解,并将λ从-75变到75,从而在解空间中沿直线生成不同的解q。图中显示了由λ控制的表面的转变。(b)求解空间系数和我们的量化函数的统计分布:收集的数据中的λ的概率密度函数PDF(红色曲线)和反向CDF(蓝色曲线)以及tan^(-1)函数(绿线)。请注意,我们的量化函数也很好地符合实践。更小的
∣λ∣会导致精细分档。
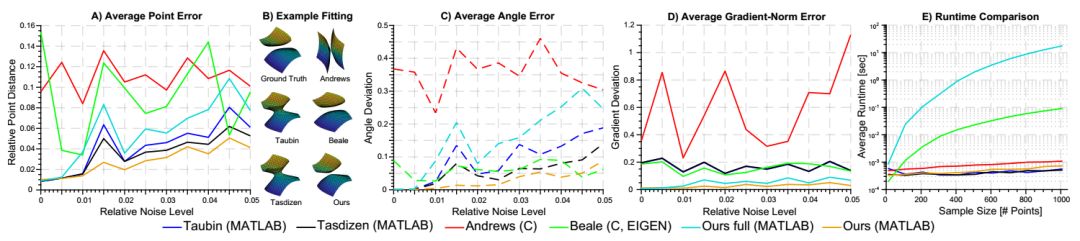
图5:综合评价:(A,C)不同二次曲面拟合方法的平均几何点(A)和角度(C)误差。每点误差测量为每个gnd的平均点到网格距离,拟合二次曲面的真值顶点。角度误差(虚线)被计算为二次梯度与gnd真值法线之间的负点积。(B)给出了示例性的拟合结果,而(D)显示出了与地面实况相比的梯度范数的平均误差。(E)为绘制合成数据的速度和检测率。
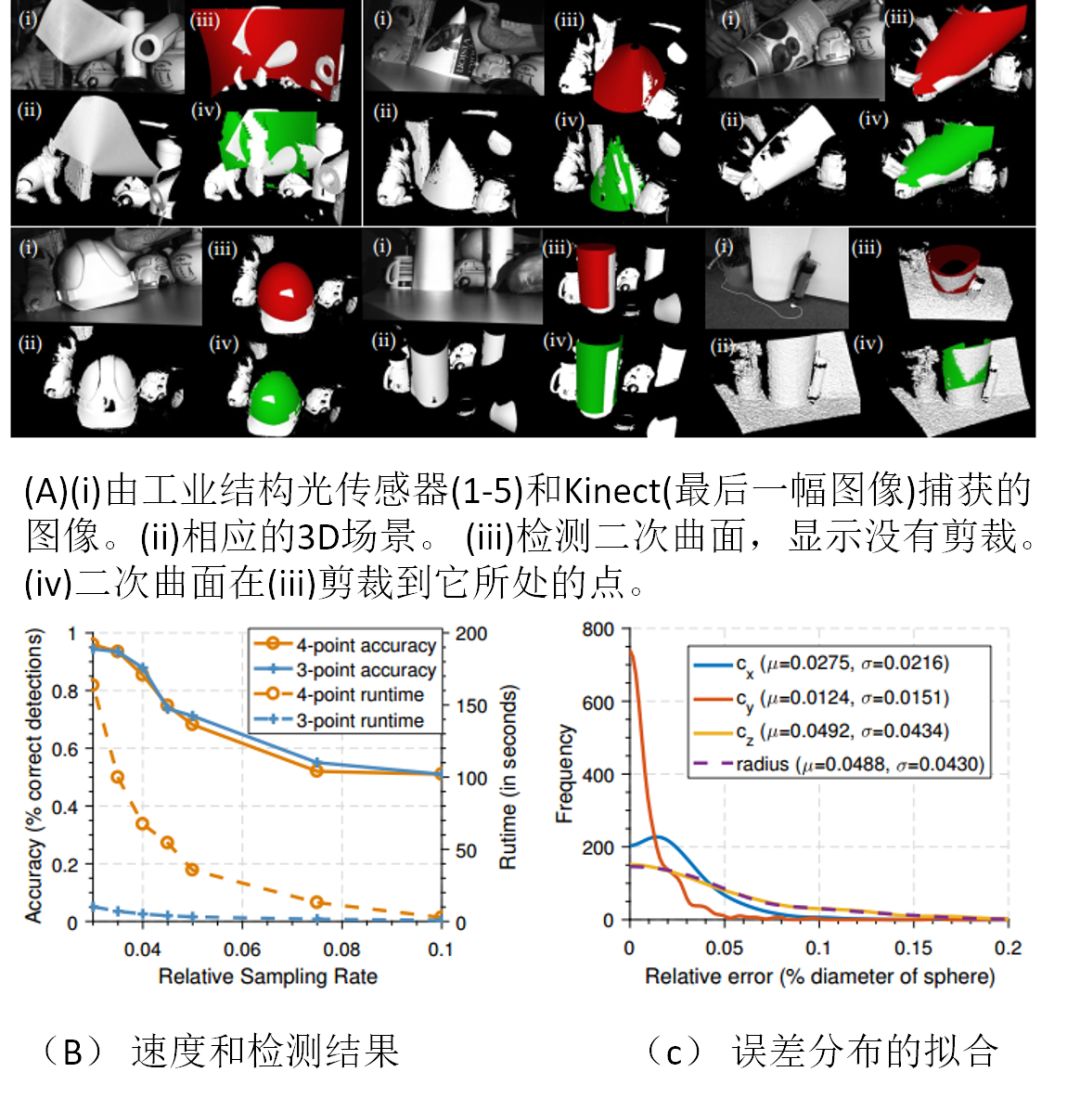
图6:真实数据集上的实验

图7. 野外球体检测的定性可视化:我们的算法在杂波、遮挡、大距离等困难场景中非常成功。请注意,球体在3D中仅使用深度图像的点云进行探测,我们绘制了二次曲面的表观轮廓。RGB图片也包括在顶部的一行,以减轻视觉感知。
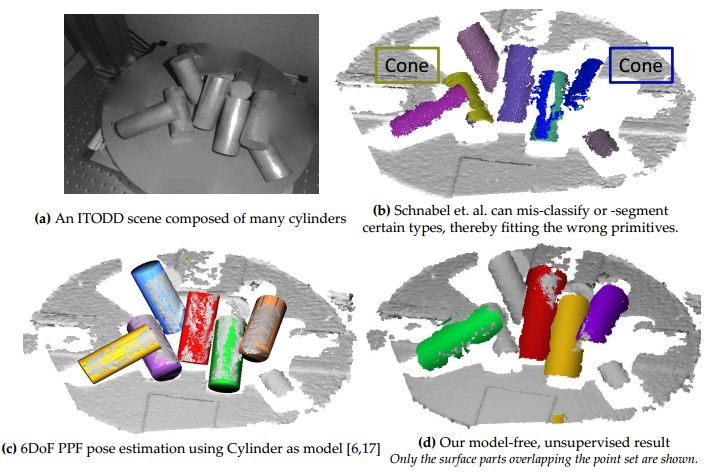
图8:杂波和遮挡下的多个柱面检测:我们的方法与钢瓶类型无关,并且对钢瓶的形状也不了解。
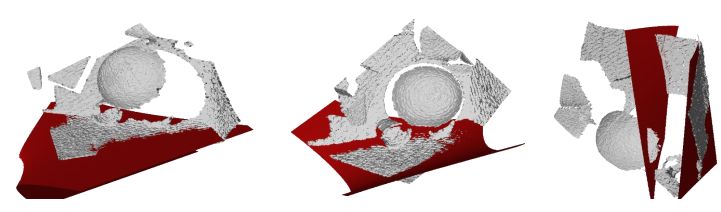
图9:当平面聚集了多数选票时,我们的方法通过紧密的非退化的二次曲面来逼近它们。

Abstract
This paper proposes a segmentation-free, automatic and efficient procedure to detect general geometric quadric forms in point clouds, where clutter and occlusions are inevitable. Our everyday world is dominated by man-made objects which are designed using 3D primitives (such as planes, cones, spheres, cylinders, etc.). These objects are also omnipresent in industrial environments. This gives rise to the possibility of abstracting 3D scenes through primitives, thereby positions these geometric forms as an integral part of perception and high level 3D scene understanding.
As opposed to state-of-the-art, where a tailored algorithm treats each primitive type separately, we propose to encapsulate all types in a single robust detection procedure. At the center of our approach lies a closed form 3D quadric fit, operating in both primal&dual spaces and requiring as low as 4 oriented-points. Around this fit, we design a novel, local null-space voting strategy to reduce the 4-point case to 3. Voting is coupled with the famous RANSAC and makes our algorithm orders of magnitude faster than its conventional counterparts. This is the first method capable of performing a generic cross-type multi-object primitive detection in difficult scenes. Results on synthetic and real datasets support the validity of our method
如果你对本文感兴趣,想要下载完整文章进行阅读,可以点击阅读原文获得链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




