





7月「大咖Live」往期嘉宾:环宇智行创始人兼董事长 李明;Maxieye创始人兼CEO 周圣砚;黑芝麻科技CEO 单记章;众向科技技术总监 田岩等。(部分音频内容皆已上线,点击阅读原文进入)
8月「智能驾驶·视觉技术专场」,我们继续每周邀请一位一线从业者带来项目实践过程中的方法和思路,为智能驾驶从业者与投资人、分析师提供行业参考。另,视觉技术专题研报也将在8月放出,新智驾会员可免费查阅,敬请期待。
文 | 于胜越
来自新智驾(AI-Drive)的报道
在过去的10几年间,数字地图帮助驾驶员指明方向和路线。但在无人驾驶时代,高精度地图则是自动驾驶汽车的必不可少的条件之一。届时,地图已经不再是单纯的车载系统。它用来指导无人车何去何从,一个0.1毫米的误差就可能酿成一次事故。
虽然高精地图不像无人汽车头顶上的“全家桶”那样引人注目,但它的确是自动驾驶必不可少的条件之一。Here的前副总裁John Ristevski说,自动驾驶时代的到来为高精度地图开创了一种新的商业可能性,总有一天会为绘图公司带来「数十亿美元」的收入。
这个蕴藏着近百亿级财富的无人驾驶细分市场,如今已经迎来了一批又一批的挖矿者。
高精度地图为何备受青睐?
业界普遍把2020年作为完全自动驾驶实现的时间节点,而大多数企业现如今还停留在部分自动驾驶上。根据SAE International(国际自动机工程师学会,原美国汽车工程师学会)的划分,自动驾驶分为5级,其中从L3级别开始,才算真的从辅助驾驶到自动驾驶的跨越。
这也意味着,L3级以上,高精地图是逃不掉的一环。而在L1、L2的辅助驾驶阶段,高精地图并不是刚需。前两个阶段的前车防碰撞预警、行人检测预警、自动巡航等辅助驾驶功能直接依赖摄像头、毫米波雷达即可实现。驾驶员依旧是车上的主角,车辆导航地图仅提供方向指示,还需司机通过眼睛观察道路环境、大脑决策控制车辆的行驶方向。
到了L3及其以上级别,自动驾驶汽车则需要自动感知检测道路环境,决策控制车辆。这就意味着道路上有多少条车道、车道方向、红绿灯变化都需要车辆知晓。在传感器在检测到相关信息后,然后对比高精地图,便可清晰的判断车辆所处的位置。
相较于车上传感器对环境的有限感知(当下视觉和激光传感器探测距离一般在200米左右),高精地图可以提前预知无限远的道路数据,这是传感器无法比拟的优势。当受到恶劣天气影响,传感器失效时,高精地图则对传感器无法探测的部分进行了补充,更有效地为无人驾驶提供最新的路况。
高精地图的组成:静态地图和动态地图
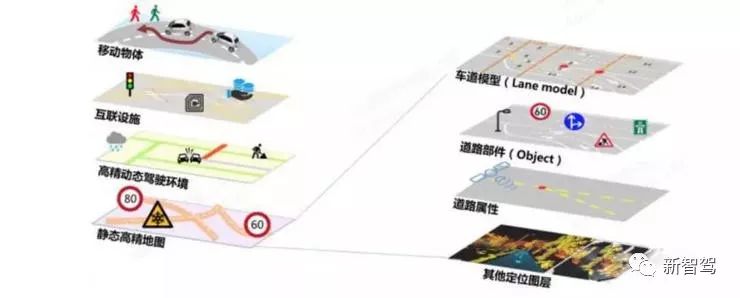
除去实时移动的车辆行人、临时出现的事故等无法提前绘制的动态驾驶环境外,静态高精地图的绘制是当下行业内的工作基础,也是攻坚点。一套完整的静态高精地图需要包含语义信息的车道模型、道路部件(Object)、道路属性三类矢量信息,以及用于多传感器定位的特征图层。
车道模型:即引导车辆从A地开往B地的道路规划,包括车道上详细信息的和连接关系。一套完整的高精地图会将车道上的中心线、车道线、车道变化属性点、以及道路分离点和车道分离点等等诸多与车辆行驶有关信息绘制出来。
道路部件(Object):包括交通标志、指示牌、龙门架、路杆等路侧及路面的各类物体,当车辆传感器探测到这些道路物体,然后再对比地图,便可得知车辆的精确位置。
道路属性:包括道路的曲率、航向、坡度以及横坡,帮助车辆执行转向、加减速。
多传感器定位的特征图层。
而那些动态数据,比如道路是否拥堵、是否发生交通事故、交通管制情况、天气情况等,也需要实时更新。这些动态数据的测绘难度更高。不过未来越来越多的无人车上路,车与车互联,一旦有车辆检测到周围环境的变化,便可通过将信息上传至云端,这样其他无人车也能知晓路上的环境变化。显然,当下行业的重点是静态高精地图的绘制,动态地图的测绘则需要更长的时间才能实现。
高精地图的测绘相较于传统数字地图更加复杂,数据收集也更繁琐。目前专业的地图测绘车队在陆地上也大多采用激光雷达等多传感器结合的方式,提取道路信息,再加上GPS等卫星导航定位系统。此外,也有众多初创企业以众包模式,通过低成本的传感器识别记录道路信息,再通过GPS/INS耦合,从正射影像图中获取相关地图信息。然后结合自身算法在云端进行数据处理,绘制出高精度的导航地图。
高精地图各路玩家
无人驾驶已是明日之子,高精地图也成为传统图商、车企、科技公司的押注重地。2016年后,这块曾经冷冷清清的无人驾驶细分市场,涌进来一大批创业公司,加上对这块蛋糕分外有兴趣的自动驾驶零部件公司和一些老牌测绘服务公司,高精地图掀起一个小浪潮。
美国对地图测绘方面的政策限制较少,被人喻为“高精地图创业者的天堂”。比较有名的初创公司DeepMap 、CivilMaps 、lvl 5 、Carmera。 此外还有Here 、TomTom 、Waymo(原 Google 地图)等国外老牌图商都在这个大戏台上折腾着。国内方面则有四维图新、百度、高德等诸多资深玩家,甚至曾经靠PPTV视频软件成名的陶闯,也于近日入局高精度地图。
国外地图巨头们
Waymo、Here、TomTom是国外高精度地图领域中的佼佼者,资深的图商们都拥有专业的测绘车队,所以这类型企业主要采用集中制图模式,强调创建完整的3D高精度地图,支持自动驾驶汽车能够完全独立驾驶。Waymo在高精地图方面多服务于自家自动驾驶车队,对外公布的信息较少。Here和TomTom,一个是有车企巨头背书,一个是传统图商,目前双方的高精度地图均已经覆盖了几十万公里。
Waymo
Waymo由于母公司Google的背书,其地图测绘车队相当庞大,通过自身拥有的地图采集车集中创建高精地图。Waymo和Google Map团队开发的高精地图如今已经可以支持L4级别的自动驾驶车辆在美国凤凰城等多个城市运行。
Waymo在绘制高精地图上采用两种策略:一是利用现在的自动驾驶车辆搭载传感器逐渐绘制高精地图。Waymo于去年发布了一个名为“车辆地图服务”的早期版本,可以将汽车的传感器数据整合到地图中。二是先利用自己的测绘车队,为无人驾驶汽车创建好丰富、详细的高清地图,然后再运用到无人驾驶导航中。
Here
2015年,Here被奥迪、宝马、戴姆勒三家德国车企巨头收购后,开始深耕高精度地图领域。有了巨头车企的支持,诸多车企和厂商开始入股牵手HERE。如今,Here背后的投资入股方也加入了腾讯、四维图新、英特尔、先锋、博世、大陆等等知名企业。阿里也早在2016年就和Here展开了高精地图方面的合作。Here也计划为迪拜创建首个用于支持自动驾驶交通的高精度地图。
Here的高精度地图Here HD Live Map建立在基础地图的基础上,配备激光雷达的Here True车辆每天奔波在大街小巷,结合卫星图像绘制车道路径、车道标记、道路边缘等多种短时间内相对不变的环境信息。
对于那些动态数据的更新则主要依赖通用等众包车辆,借助Here HD Live Map的云端能力,当车辆传感器检测到的道路信息变更,这些新特征将会上传到地图数据中,并下发到所有车辆。目前,Here HD Live Map已经完成了超50万公里道路的地图测绘,精度达到亚米级别,因此也成为宝马下一批具有高度自动驾驶功能的量产汽车的御用地图。
TomTom
和Here相比,资深的数字地图图商TomTom则没有车企巨头的撑腰,TomTom是以独立身份转型至高精地图市场。早在2015年,TomTom测绘车队就在进行自动化数据采集,通过搭载一个Velodyne激光雷达,一个360度全景相机,两台SICK雷达,还有兼容GPS和GLONASS的高精度天线的福特翼虎汽车即可完成采集任务。目前,其高精度地图数据已经实现美国本土州际公路全覆盖,线路总长18.5万公里。在全球范围内的高精度地图线路已超过38万公里,覆盖地域包括日本、美国、西欧等等。
TomTom开发了RoadDNA技术来提供高度优化的3D横向和纵向道路视图,它可以将原本的3D地图数据压缩成2D视图,同时还能保留道路上的关键要素。TomTom也和百度、Zenuity合作推出了一款自动驾驶地图交付服务—TomTom AutoStream,通过TomTom自动云端式传输最新的地图数据,确保自动驾驶地图的实时更新。AutoStream是一个完整的解决方案,包括带有智能逻辑的板载软件组件,可简化和缩短构建自动驾驶系统的公司的开发时间,这项技术将率先用到百度Apollo平台中。
单打独斗并不能完成高精度地图绘制工作。TomTom在2015年和全球第一大汽车技术供应商德国博世公司合作,联合开发能够用于自动汽车上的高精导航地图。双方预期开发的高精地图包括一层专注于车辆精准定位的“定位层”,一层帮助汽车更准确更及时的预判转弯及变道的“计划层”。TomTom也通过收购自动驾驶初创公司Autonomos,利用其3D感应,数码图形技术,解决自动驾驶领域内一些精准度的问题和特殊的问题。去年,TomTom同美国思科公司基于DAS合作研发了一项超高速车道级别交通技术。
沃尔沃旗下Drive Me自动驾驶项目正使用TomTom地图。今年年初,搭载TomTom高精地图软件的卡车已上路,遇到弯道或斜坡时,程序可以自动对车速进行调整。
国外高精地图初创公司中的玩家
DeepMap
谷歌系的DeepMap是高精地图初创公司中的头号玩家,创始团队是前谷歌地图项目的资深工程师和产品经理,CEO吴夏青、CTO马可·惠勒、COO罗维曾在谷歌地图、谷歌地球、苹果地图、百度无人车等团队中担任要职,对地图技术和定位系统有丰富的经验。
DeepMap可以为自动驾驶汽车提供一套高精地图解决方案,包括3D厘米级高精地图的构建、更新、维护和云端服务,DeepMap将这些打包起来形成一套完整的高精地图服务。DeepMap测绘车利用32线激光雷达等多传感器采集道路数据,但主要还是依靠众包模式。目前DeepMap地图服务已经被应用到福特、本田、上汽和创业公司Voyage的自动驾驶汽车上。DeepMap也已悄然进入中国,阿里、滴滴出行都是其背后的投资者。
Ushr
Ushr的高精地图依赖车上传感器和道路上的摄像头,已经绘制完成美国和加拿大的所有控制进入的高速公路网络,精度在10厘米以内,偏差小于4英寸。平台提供了最准确的中长距离传感系统,使自动驾驶汽车能够准确的进行导航。Ushr研发出一款应用程序编程接口(API),可以将其提供给车中的其他控制模块中,车企就不用再单独开发地图模块。
Ushr的高精度地图已经开始商用,搭载到凯迪拉克CT6的Super Cruise系统上,可以帮助用户在特定驾驶情境下双手脱离方向盘。Ushr将为通用提供精确的高精度地图绘图技术,以及与自动驾驶相关的其他软件技术能力。
CivilMaps
CivilMaps公司CEO Sravan是加州大学伯克利分校电气工程与计算机科学系的硕士毕业生。公司提供了一套绘制3D高精地图的硬件和配套软件系统,可以识别道路环境并海量传感器数据转换成车辆可读的地图。CivilMaps将和车企合作将这些3D地图套件将搭建到自动驾驶汽车上。CivilMaps在数据轻量化上有着很大的优势,它先利用激光雷达和相机收集数据道路数据,再利用人工智能技术,从繁杂的激光雷达点云数据中提取有用的信息,剔除大量的冗余信息。CivilMaps可以将1T大小的激光雷达点云图压缩至8MB,同时还保留重要物体标识和行车指示,图像大小是原来的1/128。高精地图数据量的减小使得传输与储存成本都显著降低,这一技术也吸引了一波投资者。
CivilMaps目前已获得福特、上汽、英特尔、斯坦福大学以及雅虎联合创始人杨致远等多家企业和投资人的青睐,共同开发自动驾驶高精地图。
lvl 5
lvl 5的工程师Andrew Kouri和Erik Reed在测绘高精度地图上深受老东家特斯拉的影响,他们和Uber、Lyft的一线司机们合作,不需要激光雷达、毫米波雷达,只用到一个手机摄像头。lvl5开发了一款名为Payver的APP,司机们下载他们的摄像APP,并将手机固定在车窗上方录制视频,记下加减速和GPS信息。这些数据就会上传至lvl 5平台并被处理为高精度地图。每十英里,司机可以得到约几美分的回报。
虽然这样的道路收集方式看起来非常不专业,但数月内,在APP下载量只有2500次的情况下,lvl5就完成了对全美高速公路90%的高精地图覆盖。如果这种方式被应用到像谷歌、苹果、高德等访问量较大的APP上,则覆盖率会更高。
Carmera
Carmera采用的是激光雷达和摄像头等多传感器解决方案,公司多利用众包模式,与物流车队合作,在其车辆上安装传感器设备进行数据采集。但由于销量较低,数据覆盖面积并不理想,所以Carmera也发动自己的车辆上路收集数据。目前Carmera的地图精度已达到厘米级,除帮助汽车定位外,还能优化导航效率,提升乘客体验。
近期,Carmera也同Renovo旗下的AWare生态系统合作,共同研发增强版地图方案,Carmera也利用搭载AWare功能的车队实时采集地图数据,并为这些车队提供地图服务。
Mobileye
Mobileye在2016年推出了道路体验管理(REM™),采用众包模式收集道路数据。依靠其计算机视觉算法的技术优势,摄像头和视觉传感系统对车道信息进行识别。Mobileye会进行几何和语义分析将其压缩成汽车可以“看懂”的数据,1公里仅有10KB左右,这些数据会被打包上传至云端,绘制出用于自动驾驶车辆能“看懂”的高精度地图,即Roadbook(路书)。
去年下半年,能够实现REM功能的EyeQ4芯片已经开始量产。Mobileye今年也将EyeQ4芯片安装到宝马、日产、大众汽车上 ,正式开始收集道路数据。Mobileye 已经和 Zenrin、日产达成合作,计划利用 REM 技术采集日本所有高速公路的道路数据。
mobileye也同四维图新在中国开发和发布Mobileye的路网采集管理(REM)产品,结合四维图新自动驾驶地图(HAD Map)与高精度定位能力,绘制适合中国自动驾驶的高精度地图。
Mapbox
Mapbox也是高精地图行业耳熟能详的名字,这是一家为开发者提供开发工具及开放平台的地图服务公司,团队有Google Maps、微软、Amazon、Uber诸多经验丰富的人才。Mapbox在去年推出了Mapbox Drive(SDK),可以让手机或汽车电脑在行驶时看到路面,识别车道或限速标志等信息。Mapbox已经和微软达成合作,将Mapbox Drive(SDK)收集到的可用信息发送至微软的Azure云计算服务进行处理,形成高精度地图。Mapbox和Mobileye达成了合作,共同开发RoadBook,为半自动或全自动驾驶车辆提供高清矢量瓦片地图。
博世
博世道路特征(Bosch Road Signature)是其进击高精度地图的方案,采用开放的战略,该技术面向所有地图厂商。博世通过众包模式利用摄像头和毫米波雷达传感器的车辆监测道路信息,相比摄像头的单一解决方案,毫米波雷达则具有高鲁棒性。再将处理后的道路特征数据上传至云端服务器,生成博世道路特征,并与地图供应商的定位参考图层同步校准,继而提供给自动驾驶汽车使用。
博世已与百度、高德及四维图达成合作,基于“博世道路特征(Bosch Road Signature)”,共同开发用于自动驾驶的高精度地图。
国内三大图商巨头
和国外相比,国内环境相对严苛,想要开展地图导航服务需要获得相应的导航电子地图制作资质。目前,四维图新、高德、长地万方、凯立德等14家公司已获得资质。互联网大佬也开始了在高精地图市场的争夺,即便不亲自申请测绘资质,BAT也通过入股、控股或收购的方式疯狂瓜分各大图商,阿里巴巴收购高德、控股易图通,腾讯收购科菱航睿、入股四维图新,百度收购长地万方。如今百度·长地万方、阿里·高德、腾讯·四维图新已在国内高精地图领域占据高地,它们在2015年前后就开始了高精地图的布局。
百度·长地万方
2013年百度收购长地万方,开始启动高精地图采集,目前已在北京、上海和广东顺德建立了三个高精地图生产采集基地,有着庞大的测绘车队和先进的人才储备。百度地图的采集车队已有 288 台车,其中具备高精度地图采集能力的车辆约40多台。搭载着 Velodyne的32线激光雷达、自主研发的摄像头和IMU惯性导航的百度高精地图测绘车每天至少采集150公里的道路数据,如今已经完成30万公里的高速公路和部分城市道路测绘,相对精度达到10-20厘米。这些收集到的道路数据通过人工智能自动识别,并由人工验证信息后再上传至云端,目前百度高精地图数据自动化处理程度达到90%以上。
百度也利用Learning-Map平台以众包模式收集更新道路数据,只要安装了百度地图和传感器,车内手机、后装硬件和车端传感器采集到的环境数据,都会发送到该平台。
百度现已和福田、一汽、比亚迪、大众等诸多车企达成合作,共同研发高精地图。人们很快就能看到百度高精地图出现在江淮明年下半年推出自动驾驶量产车型上,未来也将应用在宝马、大众汽车上。近期,百度和博世集团、TomTom等相关产业巨头打造起一个“AI based Map”,融汇基础数据、出行方式、智慧交通等信息,共同构建起“地图大脑”。
阿里·高德
2014年,阿里巴巴以15亿美元收购高德。同年,高德开启研发高精地图之路,目前已经完成了超32万公里的高精地图采集。高德专门用于HAD级别高精度地图的采集车主要通过2个激光雷达和4个摄像头采集道路信息,精度可达10厘米。高德和精准位置服务商千寻位置合作,提供“高精度地图+高精度定位”综合解决方案。目前双方在车道级定位上的解决方案可以实现普通道路条件下横向误差和纵向误差在7cm以内,高速/城市环路条件下横向误差6cm,纵向误差5cm以内。
高德先后和博世、英伟达、凯迪拉克合作研发高精地图中定位图层和数据更新方案。其高精度地图已经应用在凯迪拉克的Super Cruise系统,这也是全球首个实现高速公路释放双手驾驶的量产智能驾驶系统。
腾讯·四维图新
2014年,腾讯以超过11亿美元的价格收购了四维图新11.28%的股份。四维图新已经和博世达成合作,将后者硬件传感器所收集的道路特征数据,再通过四维图新的云计算服务平台,聚集到四维图新高精地图服务器,从而生成自动驾驶需要的高精度地图。四维图新也同Mobileye签署协议,将在中国开发和发布Mobileye的路网采集管理(REM)产品。公司高精度地图已经处于准备量产阶段,具体的上市时间也要配合主流车厂自动驾驶汽车上市计划。
国内高精地图初创玩家
因为政策的限制,BAT都是牵手拥有导航电子地图甲级测绘资质的企业入局,而国内的高精地图初创公司并不像无人驾驶初创那样繁多,但在这零零星星的公司中也有几匹黑马。
宽凳科技
宽凳科技正是国内高精地图初创公司中的典型,其创始人兼CEO刘骏是前百度LBS事业部总经理,传言他曾把百度地图市场份额做到70%。2016年刘骏以新的身份出现在大众面前,摇身一变,他成了一家高精度地图初创公司——宽凳科技的创始人。不造车、不涉及车联网,宽凳科技专攻众包高精地图。
初创公司没有雄厚的资金、宏大的测绘车队背景,宽凳同国外初创lvl 5一样摒弃掉昂贵的激光雷达,采用摄像头纯视觉技术方案。宽凳地图测绘车辆上的摄像头通过同一角度拍摄多张照片获得详细的道路信息,再利用自主研发的图像识别处理算法,可以形成精度高达20厘米左右的自动驾驶地图。虽采用纯视觉方案,宽凳的地图精度远比lvl 5更高,后者地图精度做到了30-40厘米。
宽凳科技去年获得了乙级测绘资质,目前已经测绘完北京大多数道路的高精地图,今年将推出全国首张量产的高精度地图。
极奥
极奥的创始人王雪坤是前四维图新的产品总监,期间,他曾主导了导航产品FunDrive和车联网产品WeDrive的开发,同时还曾负责宝马、沃尔沃、马自达等车企的项目工作。
极奥现拥有超500万的众包车辆,利用车辆上的后装硬件,例如行车记录仪、OBD、单双目视觉ADAS、毫米波雷达每天收集近1亿公里的道路数据,再通过自主研发的拓扑路网生成平台、驾驶行为分析平台、交通语义及深度学习平台,生成新一代的“时空智能地图”,自动化程度已经高达90%以上。极奥的“时空智能地图”分为交通设施层(路网、车道线、交通标志),环境层(利用时间维度判断路灯何时开闭),行为层(周围车辆行人的运动情况)。
极奥现已和物流公司达成合作,物流车为极奥提供数据,后者为物流公司提供的智能配送路线。后期,极奥将向 Tier-1、整车厂、自动驾驶公司提供高精地图地图服务。
Momenta
成立于2016年的Momenta是一个年轻的自动驾驶公司,它主要通过提取众包车辆拍摄的2D图像语义点(车道标线、标牌等地标点),鉴于多张图像存在视差,Momenta利用点的对应关系,即可重建道路、交通标志及周围环境的3D位置,这种原理类似于人眼双目视觉,再融合GPS和IMU数据,创建更高精度的地图。
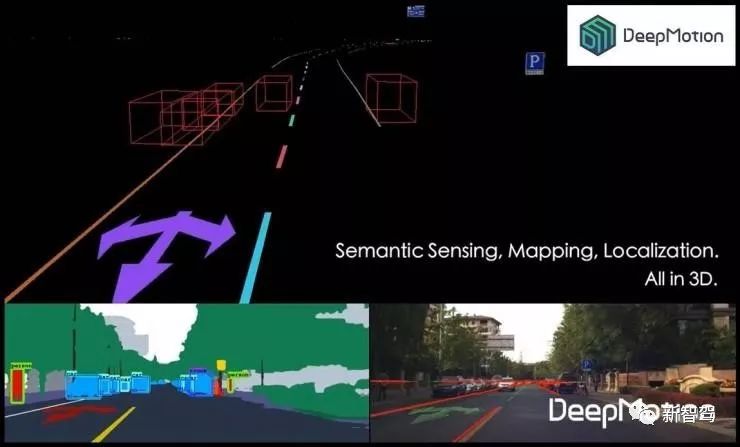
Deepmotion
Deepmotion的四位创始人在场景分割、物体识别、SLAM、三维重构具体应用领域实战经验丰富,他们并没有采用的以激光雷达为主的高精地图采集方案,通过精心设计的算法将一套低成本的双目相机和GPS惯导模组融合成车载传感器套件DM-100,为自动驾驶车辆提供环境感知、高精地图绘制以及高精定位三大能力。目前Deepmotion也正在开发三目和单目方案。其中,消费级GPS与惯导成本还不足200元,相比于10万-20万的专业级GNSS组合惯导,成本大大降低。另外,也会通过视觉对比保证定位精度,现车辆横向定位能达到10厘米,纵向定位是20厘米。
DM-100是Deepmotion实施高精地图众包方案中的重要一环。Deepmotion计划先完善城区道路高精地图自动化构建的相关技术,准确理解客户对高精地图使用的具体需求后,再确定最高效的众包模式。Deepmotion的高精度地图路线先从较复杂的中心城区开始,目前城区道路高精地图的自动化测绘程度已经达到90%。
Wayz.ai
前PPTV创始人陶闯也在2017年加入了高精地图阵列,创办Wayz.ai,主攻完整的位置服务解决方案。陶闯原是微软地图创始人和全球负责人,曾主导创立 3D 地图服务商“GeoTango”,团队成员大多来自美国NASA喷气推进实验室、微软、谷歌、高通、Here、Uber、Esri等公司,在自动驾驶方面经验颇丰。
Wayz.ai已初步建立基于端和云的而架构,HD高精地图, 高精定位,导航与规划,安全仿真测试和位置云服务的全套完整解决方案。Wayz.ai已与数家一线厂商完成对接,并进入技术产品联调阶段,近期也刚获得8000万美元A轮融资。
滴滴
尽管滴滴在自动驾驶方面比较低调,但滴滴也为自己成立了一个地图公司—滴图科技,并在去年获得甲级基测绘资质。滴图科技在技术上信息公布较少。不过为了开展业务,滴图成立初期,滴滴曾在四维图新挖走了数名地图领域的专业人才。庞大的快车、专车、出租车队伍对于滴滴来说是一笔财富,公司可以通过众包模式,利用滴滴运营车辆收集各地道路信息。
京东
电商大佬京东在近日公布了自家的高精地图。在收集方面,京东采用自主研发的三维激光移动测量系统对道路环境进行识别,再借助AI和大数据进行处理。目前京东已经正式向国家测绘管理部门提交了甲级导航电子地图制作资质申请。
总结下来,高精地图作为自动驾驶汽车上不可或缺的一部分,无论是车企还是传统图商、科技公司都不想错失这一风口。在2014年前后,Here、TomTom、高德、四维图新等传统图商开始向高精地图进攻;一批如DeepMap、CivilMaps、lvl 5、宽凳科技等等初创企业也开始向高精度地图进军,还有像滴滴、Uber这样的出行服务商也开始利用车队优势抢滩高精地图。车企和科技巨头们也通过收购等方式入局,比如Here被奥迪、宝马、戴姆勒三大车企联合收购,BAT均入股收购拥有测绘资质的图商。初创公司也开始和车企合作,利用其车队搭载摄像头收集数据,比如CivilMaps和福特上汽、DeepMap和本田、lvl 5和物流车队。
Here、TomTom 、Waymo、百度、阿里高德,这些资金雄厚、测绘经验丰富的玩家,他们拥有专业的测绘车队,多采用集中制图模式,强调创建完整的3D高精度地图,支持自动驾驶汽车能够完全独立驾驶。而另外几家老牌图商开始发动行业车队采集,例如利用物流车、出租车等车辆上的GPS、摄像头等传感器收集实时的道路轨迹和路况信息。这种模式成本高、精度高,相应的,成本更大。
每辆地图采集车高达数百万,这对于大多数初创图商来说并不是小数目,所以他们多采用众包模式,或和整车厂、出行服务商合作,类似于UGC模式,发动私家车辆通过简易简易低成本的摄像头采集道路信息。不过众包模式也存在精度低、效率低等问题。
以专业车队集中测绘的地图为基础,众包模式为辅,逐步完善高精地图可能是未来的发展模式。毕竟,未来越来越多的自动驾驶汽车上路,车顶上的传感器用来收集环境,进行道路信息实时更新会容易得多。
在商业模式上,有提供技术和测绘服务的企业,也有注重量产化高精地图的玩家。DeepMap是典型的一站式制图外包服务商,既可提供软硬件采集方案,又可提供云端服务,同时也可以为客户做出一张定制化地图。CivilMaps、Ushr、Deepmotion等公司也注重绘制3D高精地图的硬件和配套软件系统。像高德、Carmera、lvl 5则更注重高精度地图产品。【完】
推荐阅读:
日本要在2020前完成高精度地图采集,但你可知个中的战略细节?
最新「大咖Live」预告:
7月「大咖Live」往期嘉宾:环宇智行创始人兼董事长 李明;Maxieye创始人兼CEO 周圣砚;黑芝麻科技CEO 单记章;众向科技技术总监 田岩等。(部分音频内容皆已上线,点击阅读原文进入)
8月「智能驾驶·视觉技术专场」,我们继续每周邀请一位一线从业者带来项目实践过程中的方法和思路,为智能驾驶从业者与投资人、分析师提供行业参考。另,视觉技术专题研报也将在8月放出,新智驾会员可免费查阅,敬请期待。



