北理工:一种评价无人驾驶车辆智能水平的新方法 | 厚势

厚势按:国内外无人驾驶车辆迅速兴起,为加快无人驾驶车辆关键技术研究,进行无人驾驶车辆智能水平等级划分成为首要任务。
本文建立了由环境复杂度、人工干预程度、任务复杂度组成的无人驾驶车辆智能水平评测模型,并对无人驾驶车辆在这三个维度上进行 5 个等级的划分。最后根据无人驾驶车辆行驶的环境复杂度、人工干预的程度、执行任务的复杂度及行驶质量,对无人驾驶车辆智能水平进行了 10 个等级划分。
本文原标题为《无人驾驶车辆智能水平等级划分》,作者为北京理工大学孙扬博士(现为河北工程大学机械与装备工程学院副教授),原载于 2017 年 9 月 13 日出版的《科技导报》(ID:STReview)。
无人驾驶车辆(也称轮式移动机器人)能够依靠自身携带的传感器感知车辆周围环境,根据任务要求实时决策执行,并保证车辆的安全性和稳定性 [1-2]。美国国家科学委员会指出,无人平台加入战场将是未来军事发展的一个必然趋向 [3]。世界各国也越来越关注无人驾驶车辆技术,并相继投入相关研究和开发中。越来越多的车企也陆续将无人驾驶技术加到自己的车系中,并加大在无人驾驶方面的研究投入;各大车企无人驾驶汽车相继出现,无人驾驶车辆技术在未来汽车行业将成为一个新亮点 [4]。
一套完善的评测系统对无人驾驶车辆智能水平的评价是至关重要的,评测模块将按照给定的评测系统对无人驾驶车辆的智能行为做出评价。2003 年,美国国家标准研究院提出并建立了针对地面无人平台分类和评估的无人系统自主级别(ALFUS)框架 [5],从此测评体系有了规范性框架和理论指导。
美国举办了 3 届美国国防高级研究计划局(DARPA)无人驾驶车辆比赛,分别是 2004 年[6]、2005 年的越野挑战赛 [7] 和 2007 年举办的 DARPA Urban Challenge [8],测试题目均由第三方给出,参赛车队赛前并未被告知测试场地和测试题目,根据各队完成预定任务的耗时对无人驾驶车辆进行定量评价 [9]。这 3 届 DARPA 赛事只是采用了简单的定量评价,并未对无人驾驶车辆的智能水平等级进行评价。
2009 年 6 月,首届「中国智能车未来挑战」大赛的举行是中国对无人驾驶车辆首次实行第三方测试评价,对中国无人驾驶车辆探索从理论走向现实、加速无人驾驶车辆研发进程做出了重大贡献 [10]。从此每年均举办一届「中国智能车未来挑战」大赛,至 2017 年 2 月共举办了 7 届。大赛的评价规则采用定性和人机结合的评判方法,实现了无人驾驶车辆智能水平的量化。通过比赛可以看到无人驾驶车辆的智能水平逐年提高,但是对其智能水平处在什么等级尚待评价。
本研究组对无人驾驶车辆的定量评价做过一些尝试,提出了基于成本函数的定性定量相结合的评价方法 [11] 和模糊层次分析(fuzzy-AHP)评价方法 [12],并对无人驾驶车辆的评测体系进行了研究 [13]。这些方法,在一定程度上实现了无人驾驶车辆的定量评价,但是并未实现无人驾驶车辆智能水平的等级划分。
纵观国内外的一系列无人驾驶车辆比赛,虽然实现了智能水平的评价,但是均未对其所处的智能水平等级进行评价。一套完善的无人驾驶车辆智能水平测评系统,首先要对无人驾驶车辆智能水平等级进行划分,这需要进一步的深入研究。
1. 无人驾驶车辆智能行为的产生
无人驾驶车辆利用安装在不同部位的传感器来感知周围环境,获得道路、自身位姿、障碍物和背景环境等信息 [14]。传感器捕捉到的任何细微变化都会影响无人驾驶车辆的行为,例如光线、温度的变化及对路面平整度捕捉的变化都会对无人驾驶车辆的分析决策造成影响。无论是任务的改变还是环境的改变,均会改变无人驾驶车辆的行为。由此,通过环境-任务-无人驾驶车辆三者交互激发无人驾驶车辆的智能行为(图 1)。
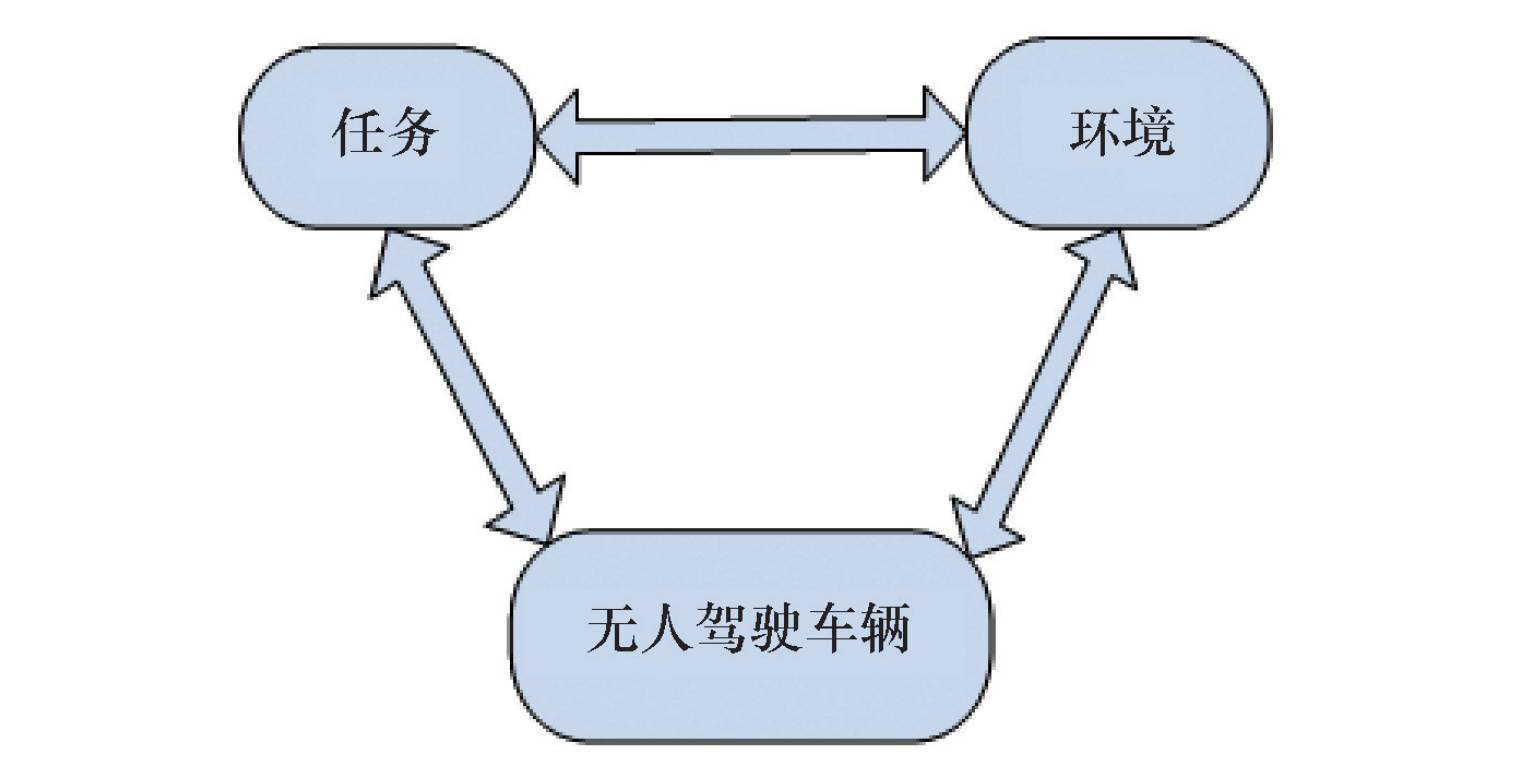
图 1 环境-任务-无人驾驶车辆交互模型
不同环境和任务对无人驾驶车辆的行为影响也不同,无人驾驶车辆必须实时捕捉周围环境的变化,必须准确判断周围环境中的障碍物,如行驶的车辆、走动的行人等,并执行相应的安全避让措施。同时应准确识别车道线、交通灯、标识牌、护栏等并做出准确决策。
当自然环境发生变化时无人驾驶车辆也应改变自己的行为,如遇到雾天、雨天、雪天等特殊天气,无人驾驶车辆应当保持适当的车速、车距并且准确地变换灯光。遇到窄路、起伏路、坑洼路等特殊路况时,无人驾驶车辆也应当选择最优路线进行行驶、会车及掉头。
2. 无人驾驶车辆评测模型
无人驾驶车辆评测模型通过人工干预程度(Human Intervention,HI)、完成任务复杂度(Mission Complexity,MC)和环境复杂度(Environmental Complexity,EC)表现(图 2)。
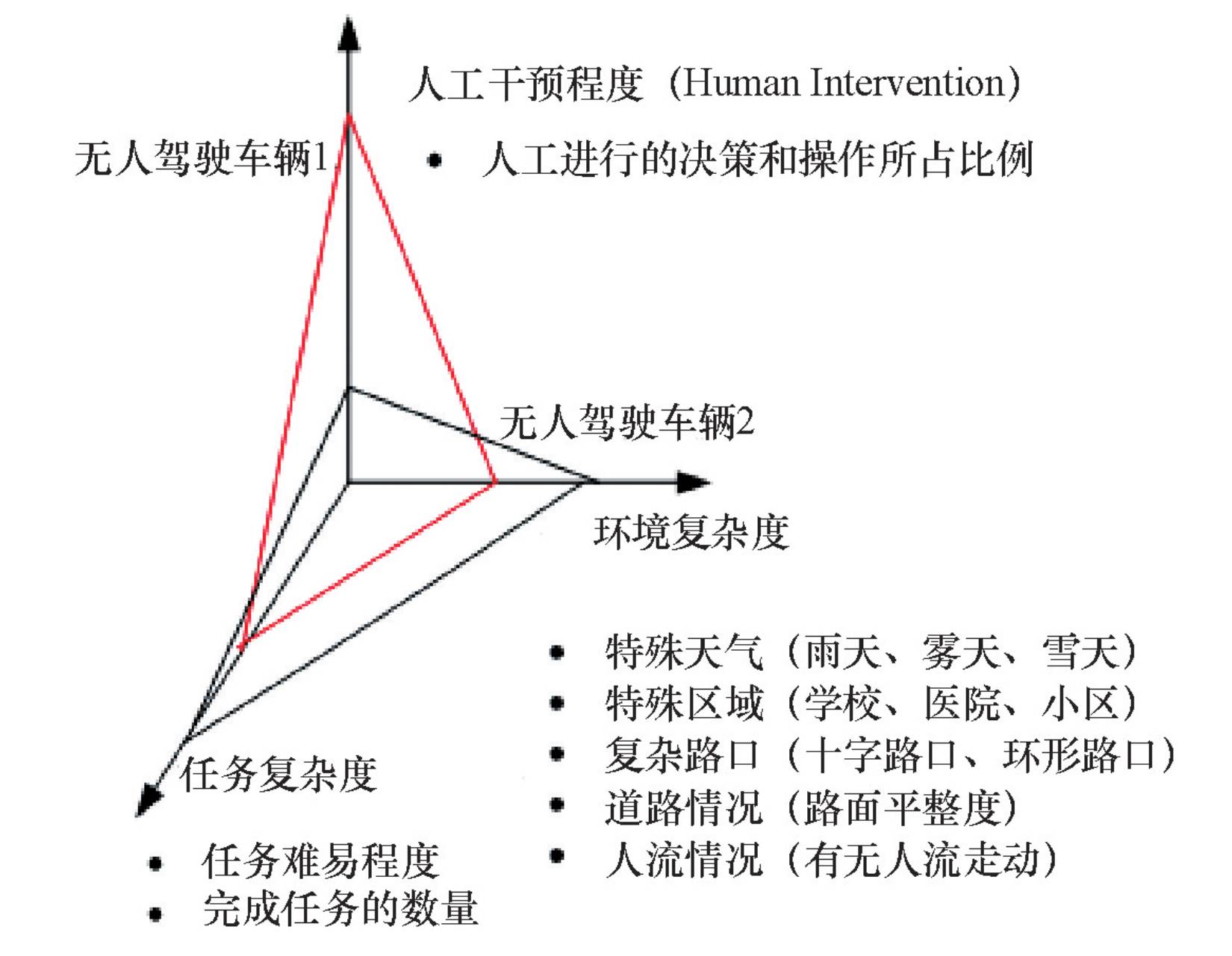
图 2 无人驾驶车辆评测模型
把人工干预程度(人工进行的决策和操作)、任务复杂度(任务难易程度、完成任务的数量)、环境复杂度(特殊天气、特殊区域、复杂路口、道路情况、人流情况)作为评价无人驾驶车辆智能水平的 3 个方面,建立 3 维坐标体系,3 方面各自作为一轴,通过 3 因素在 3 坐标轴上所占比例进行无人驾驶车辆评测模型的建构。
3. 无人驾驶车辆智能水平等级划分
3.1 ALFUS 评测框架 10 等级划分
根据美国国家标准与技术研究院启发式定性评价体系的 ALFUS 评测框架,生成 10 个相对应的自主等级:
当无人系统完全由人工控制、无自主性时,即代表智能水平为 0 级;
第 10 级表征任务极其复杂、环境极端恶劣,能够完全自主,自主水平优秀;
7~9 级表征任务复杂性/协作性要求高、环境复杂、自主水平良好;
4~6 级表征任务难度中等、环境复杂程度中等、自主水平中等;
1~3 级表征环境简单、任务要求较低、自主水平差。
基于这 10 级评价,智能无人系统的自主性程度差别可以直观地从等级划分中体现出来。
3.2 无人驾驶车辆人工干预程度
根据人工干预程度,在无人驾驶车辆行驶过程中所占比例将其进行 5 等级划分。
一级(远程控制):无人驾驶车辆不能进行自我决策且无自主性,需要操控人员进行环境感知和理解、路径分析和规划并由操控人员进行决策。无人驾驶车辆的行为受操控人员干预程度较大。
二级(远程操作):操控人员根据无人驾驶车辆感知的周边环境信息进行分析、规划和决策,感知任务大部分由操控人员进行,操控人员根据无人驾驶车辆提供的感知信息控制其行为。
三级(人为指导):操控人员接收无人驾驶车辆的环境感知报告。由操控人员进行大部分的分析、规划和决策任务,由操控人员和无人驾驶车辆共同进行感知和任务执行。
四级(人为辅助):操控人员接收无人驾驶车辆的环境感知报告。由操控人员和无人驾驶车辆共同进行分析、规划和决策任务,由无人驾驶车辆进行大部分的感知和任务执行。
五级(自主):在满足无人驾驶车辆执行能力的条件内,任务分析、路径规划和行为决策在很大程度上由无人驾驶车辆来承担。无人驾驶车辆不受操控人员控制,操控人员对无人驾驶车辆的行为基本无干预。操控人员接收无人驾驶车辆的环境感知报告,由无人驾驶车辆独立承担所有的环境感知和任务执行,并且完成任务分析、路径规划和行为决策,协作可能要由操控人员来完成。
3.3 无人驾驶车辆环境复杂度
无人驾驶车辆对环境的识别往往是评价其智能水平最紧密的参数之一,无人驾驶车辆的智能水平等级根据对无人驾驶车辆的行车行为表现以及交通行为表现的分析来进行划分。真实道路具有复杂性和不可预测性,无人驾驶车辆的认知能力与交通环境的变化有关。根据车辆行驶环境,将环境复杂度进行 5 等级划分。
一级(环境复杂度最低):简单道路(直道),路况平坦(无坑洼),天气良好,光照良好,行人少,路口少,交通灯、交通标志少。
二级(环境复杂度低):一般道路(直道、弯道),路况一般(有较小坑洼),光照一般,动态行人较多,较复杂路口,有交通灯、交通标志。
三级(环境复杂度中等):较复杂道路(简单车道线、减速带等),路况较恶劣(车辙、坑槽、路面破损等),光照较弱,动态行人多,相对复杂路口,交通灯、交通标志较多。
四级(环境复杂度高):复杂道路(复杂车道线、绿化带、分离带等),路况恶劣(泥泞土路、松散沙路、水坑等),阴天,光照弱,较多动态的行人、机动车及非机动车等,复杂路口,交通灯、交通标志多。
五级(环境复杂度最高):特别复杂道路(立交桥,各种车道、匝道,指示牌、道路信息牌等),路况极端恶劣(积水、积雪,落叶、遗撒物等障碍物覆盖),雨天、雪天、雾天等极端天气,光照最弱,动态行人最多(学校、医院、拥挤路口等),有高速行驶车辆,极其复杂路口,交通灯、交通标志最多。
3.4 无人驾驶车辆任务复杂度
任务规划能力的自主性体现在无人驾驶车辆根据突发状况进行任务规划与重规划的能力 [15]。对无人驾驶车辆完成单项多组任务的能力进行测试,以独立完成任务的数量和质量为依据对无人驾驶车辆任务复杂度进行 5 等级划分。
一级:远程控制启动、刹车、停车,无感知能力和决策能力。
二级:直线车道保持、停车线停车、GPS 导航性能、限速,能够对车道线、停车线进行识别,完成路径规划及停车行为决策。
三级:车距保持、弯道车道保持、避让静态障碍物并返回原车道,能够对路面拓扑结构、车辆、障碍物进行识别及车距检测,完成弯道、跟车行为决策及路径规划。
四级:语音指令停车、避让动态障碍物并返回原车道、泊车、紧急制动、GPS 信号缺失时的导航性能,能够对障碍物、语音、车道线、停车位进行识别并具有车辆位置信息丢失下的基本行车行为的鲁棒性,完成局部路径规划及泊车行为决策。
五级:识别道路标志后的车速和路径规划、紧急声音的车速和路径规划、信号灯停车排队,能够对道路标志、警车、救护车、救火车鸣笛语音、交通信号灯标志、车辆识别,完成道路标志、紧急声音、交通信号灯认知下的行为决策、局部路径规划及全局路径规划。
3.5 无人驾驶车辆智能水平等级划分
无人驾驶车辆智能行为的表现直接决定了无人驾驶车辆智能水平等级。对无人驾驶车辆智能水平的评价取决于环境复杂度、任务复杂度、人工干预程度、行驶质量(表 1)。
表 1 无人驾驶车辆智能水平等级划分
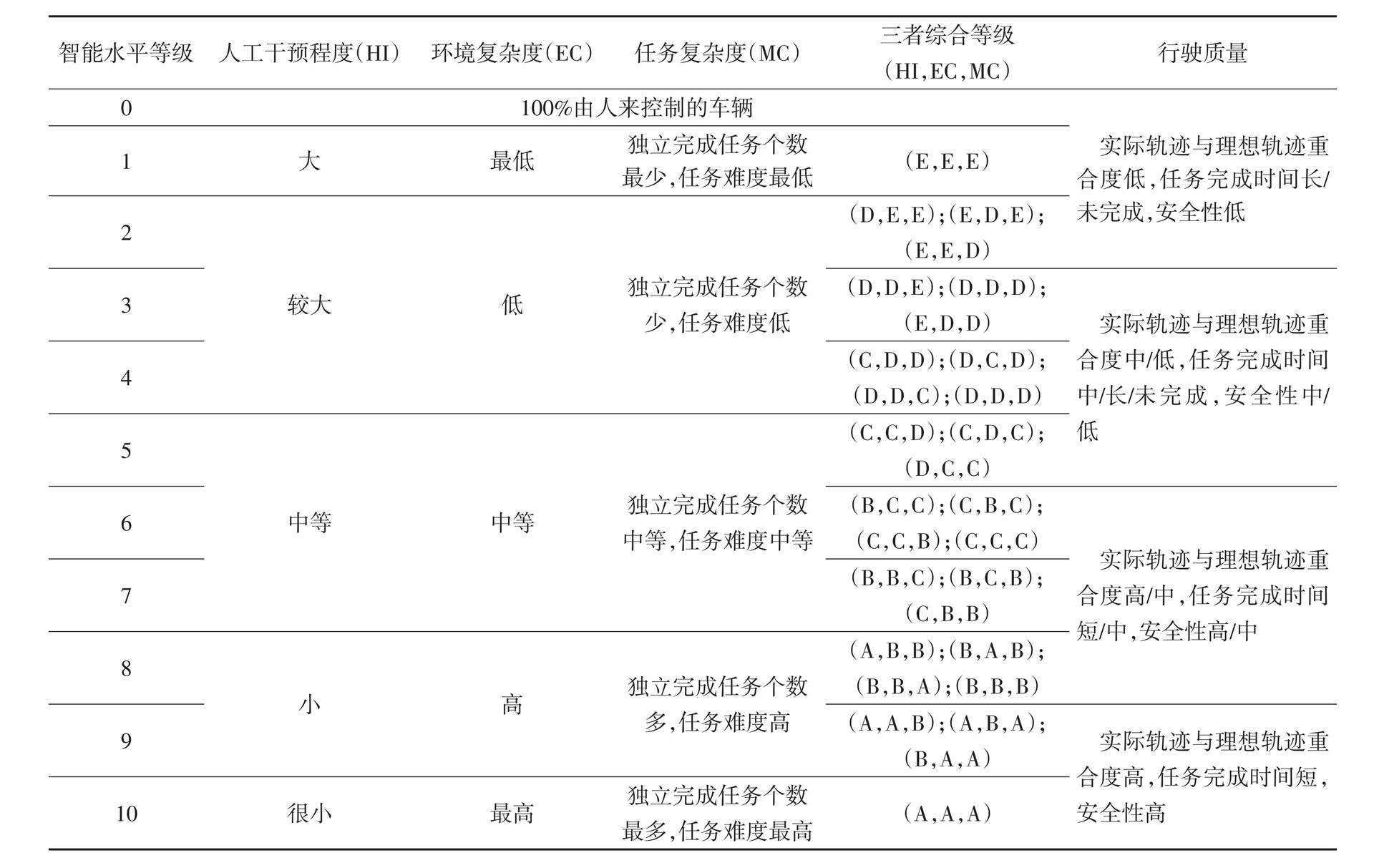
如表 1 所示,无人驾驶车辆的综合等级对应 10 个智能水平等级,根据综合等级的高低(A 最高,E 最低)来评价无人驾驶车辆智能水平高低(例如,如果任务复杂度最高、环境复杂度最高、人工干预度最小,则综合等级为(A,A,A))。
4. 结论
1)无人驾驶车辆智能水平的等级由它表现出来的智能行为来决定。无人驾驶车辆的智能行为是由无人驾驶车辆自身、所处环境和所执行的任务三者交互共同作用激发的。
2)根据无人驾驶车辆的人工干预程度、任务复杂度、环境复杂度在评测模型各坐标轴上所占的比例,可以直观地对无人驾驶车辆的智能水平做出评价。
3)通过对无人驾驶车辆行驶环境的复杂程度、任务的复杂程度、人工干预的程度及行驶质量的评价,可对无人驾驶车辆智能水平进行 10 等级划分。
参考文献
编辑整理:厚势分析师拉里佩
转载请注明来自厚势和厚势公号:iHoushi
-END-
文章精选
企业家
智能驾驶
新能源汽车
项目和评论
这些大神从Google出走,创办了五家(命运各异的)无人车公司
厚
势
汽
车
为您对接资本和产业
新能源汽车 自动驾驶 车联网
联系邮箱
bp@ihoushi.com

点击阅读原文,查看文章「马里兰大学:全固态锂电池研究进展」





