镭神多线激光雷达强势赋能许昌芙蓉湖5G自动驾驶示范区
点击上方“公众号”可以订阅哦!
深圳市未来产业促进会副会长单位:深圳市镭神智能系统有限公司
近日,依托5G网络、路测感知系统和边缘计算平台,自动驾驶清扫车、观光车、乘用车等多种车辆在许昌芙蓉湖畔的5G自动驾驶示范区成功开展了实验和测试。示范区里,由镭神智能与北京邮电大学、中移智行在5G网联自动驾驶领域的多项科研成果在许昌进行了验证、示范和测试,标志着许昌芙蓉湖5G自动驾驶示范区正式投入运营,对5G自动驾驶产业的发展具有重要意义。

芙蓉湖5G自动驾驶示范区的建设,是基于北京邮电大学温向明教授团队和许昌市在车联网领域的合作,在市委市政府和城乡一体化示范区的支持下,由北京邮电大学联合中移智行、清华大学、镭神智能等5G自动驾驶联盟多个单位共同建设完成,并成为河南省首个具备完善开放道路测试环境的智能网联汽车测试场,可实现交通标志和标线的识别及响应、交通信号灯识别及响应、障碍物识别及响应、行人和非机动车识别及避让、跟车行驶、靠边停车、并道、人工操作接管、联网通讯等网联汽车测试场景,并已有观光车、乘用车、道路清扫车等多种类型车辆在相继开展测试。

镭神智能作为全国激光雷达行业的领导者,成为许昌芙蓉湖车路协同项目的重要参与者与支持者,为项目提供了多线激光雷达和智能路侧环境感知系统方案。

车路协同智能路测环境感知系统方案
车路协同是创建新一代智能交通系统的核心,镭神智能路测环境感知系统方案为车路协同提供全时空动态交通信息采集与融合,通过在有条件的高速公路、遮挡的丁字路口、交叉路口等路况下,安装集成的激光雷达+摄像头的路侧传感器设备,对探测范围内行驶在交通道路上的各种机动车、非机动车、行人等进行精准的检测、识别处理,获取目标位姿信息,再经传输设备将有效信息广播给交通管控中心和该区域内安装有车载设备的车辆,实现路况险情提前预警,提高通行效率,从而形成的安全、高效和环保的道路交通系统。

系统组成
镭神智能路测环境感知系统方案由多线激光雷达、摄像头、数据采集和算法处理单元、主处理器模块、车路通信单元及车载设备组成。
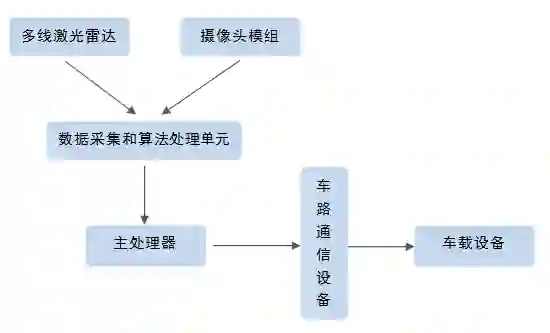
1)多线激光雷达:是系统核心传感器,实时扫描探测安装区域内障碍物,能够提供探测范围内作业环境实时点云数据;
2)摄像头模组:通过标定与激光雷达世界坐标系参数,为探测区域内激光雷达探测到的障碍物提供融合检测识别数据,并能进一步的提供障碍物更真实的图像信息。
3)数据采集和算法处理单元:为系统的核心算法功能模块,主要功能包括激光雷达和摄像头坐标位置标定,并分别采集获取激光雷达点云信息和摄像头视频图像信息,然后通过融合处理对可探测范围内的移动障碍物(卡车、小汽车等机动车、非机动车、行人等)进行检测、识别处理后计算出关联目标的方位、距离、速度及运动方向等信息,并可根据实际路况场景做进一步警告威胁判断。
4)工控主处理器:该模块为系统及算法运行硬件处理平台,包括对传感器设备的接入,算法的处理及通信设备的连接。
5)车路通信设备:该模块为路侧系统的通信模块单元,将系统处理好的路况目标信息通过广播的模式发送到各车载设备终端。采用5.8GHz DSRC模块。
6)车载设备:该模块为车载设备终端,可实时接收通信设备广播的路况目标信息并通过显示设备给驾驶员以警示功能。
方案优势
激光雷达与摄像头功能互补,有效提高数据获取的准确性与可靠性
先进的神经网络算法经深度学习精准识别目标属性,可输出机动车、非机动车、行人等的类型、方位、距离、速度、运动方向及流量等信息
可根据实际路况场景做进一步警告威胁判断,如管制道路异物入侵警告、盲点警告等等
适用于各种复杂路段实现全方位无死角的监测覆盖
▽ 镭神多线激光雷达路侧感知点云

▽ 镭神多线激光雷达与视觉融合算法


▽ 镭神激光雷达RTK-SLAM效果图

注:投稿请电邮至124239956@qq.com ,合作 或 加入未来产业促进会请加:www13923462501 微信号或者扫描下面二维码:

文章版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将删除内容或协商版权问题!联系QQ:124239956





