CAA | 平行学习——一个新的机器学习理论框架

平行学习——一个新的机器学习理论框架
李 力 林懿伦 郑南宁 王飞跃
随着计算能力的提高和计算理论的创新, 机器学习在过去 30 年中取得了长足的发展, 正受到越来越多人的关注。与此同时, 机器学习也面临越来越多的问题, 传统机器学习理论框架的不足被逐渐发现和确认, 新的机器学习理论框架不断被提出。
中国科学院自动化研究所王飞跃研究员于2004年提出了平行系统的思想[1], 试图用一种适合复杂系统的计算理论与方法解决社会经济系统中的重要问题。其主要观点是利用大型计算模拟、预测并诱发引导复杂系统现象, 通过整合人工社会, 计算实验和平行系统等方法, 形成新的计算研究体系。平行的核心思想是从“小数据”中产生“大数据”, 再从“大数据”中提炼“小规则”即精准知识。这一思想也应是机器学习的主旨。
近年来, 我们尝试将平行系统的思想扩展并引入到机器学习领域, 以建立一种新型理论框架, 更好地解决数据取舍、行动选择等传统机器学习理论不能很好解决的问题。在本文中,我们将对这一理论框架的结构和方法进行阐述。框架示意图如下:
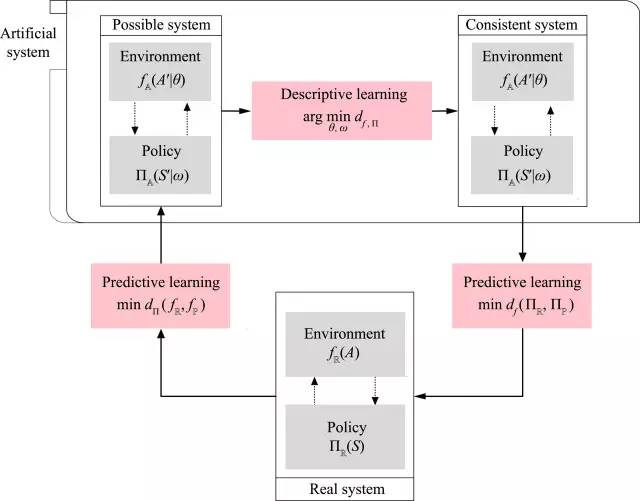
图1 平行学习的理论框架
平行学习[2-3]大致可以分为描述学习(Descriptive learning)、预测学习(Predictive Learning)、指示学习(Prescriptive Learning)三个互相耦合关联的阶段。
在数据处理阶段, 平行学习首先从原始数据中选取特定的“小数据”, 结合先验知识, 使用描述学习产生一个人工系统。 结合特定的原始小数据与人工系统, 使用预测学习的方法产生大量的新数据, 构成了解决问题所需要的“大数据”。
在行动学习阶段, 平行学习沿用强化学习的思路, 使用状态迁移来刻画系统的动态变化, 通过指示学习的方式在人工系统中对行动空间进行探索。通过学习提取, 我们可以得到“小知识”——应用于某些具体场景或任务的精准知识, 并将其应用于平行控制和平行决策。而平行控制和平行决策将引导系统进行特定的数据采集, 获得新的原始数据, 并再次进行新的平行学习, 使系统在数据和行动之间构成一个闭环。
以平行学习在自动泊车中的应用为例[4]。首先通过获取真实系统中的泊车数据, 结合计算实验与预测学习生成人工数据, 形成泊车的“大数据”。使用这些数据学习构造一个人工系统, 该系统平行于真实的泊车系统, 接受控制序列作为输入, 输出车辆的移动轨迹。在这一人工系统中, 我们可以使用指示学习的方式探索可能的泊车方案, 学习到的策略会控制真实车辆进行泊车, 进而获得更多的数据。完整流程如下:
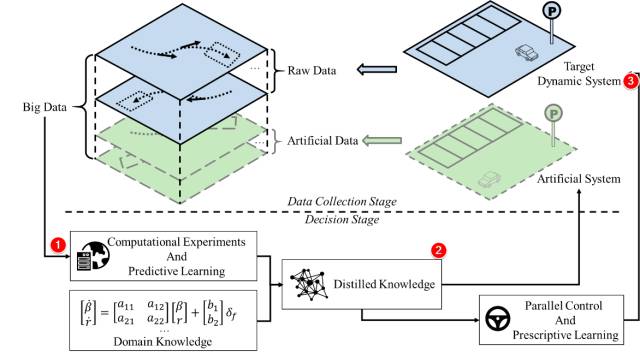
图2 平行学习在自动泊车中的应用
平行学习已在虚拟场景生成[5]、无人驾驶车辆的智能控制与测试[6]、社会计算和情报处理[7]等领域得到了较好的应用。期待本文抛砖引玉, 引起业内专家学者兴趣, 共同对机器学习理论做出更加深入的革新。
参考文献
[1] 王飞跃. 人工社会, 计算实验, 平行系统-关于复杂社会经济系统计算研究的讨论. 复杂系统与复杂性科学, 2004, 1(4): 25-35.
[2] L. Li, Y.-L. Lin, N.-N. Zhang, and F.-Y. Wang, Parallel learning: a perspective and a framework, IEEE/CAA Journal of Automatica Sinica, vol. 4, no. 3, pp. 389–395, July 2017.
[3] 李力, 林懿伦, 曹东璞, 郑南宁, 王飞跃. 平行学习——机器学习的一个新型理论框架. 自动化学报, 2017, 43(1): 1-8.
[4] Y.-L. Lin, L. Li, X.-Y. Dai, N.-N. Zheng, and F.-Y. Wang, Master general parking skill via deep learning, Proceedings of IEEE Intelligent Vehicle Symposium, 2017.
[5] K.-F. Wang, C. Gou, N.-N. Zheng, J. M. Rehg, and F.-Y. Wang, Parallel vision for perception and understanding of complex scenes: methods, framework, and perspectives, Artificial Intelligent Review, vol.48, no.3, pp.298-328, Oct. 2017.
[6] W. Liu, Z.-H. Li, L. Li, and F.-Y. Wang, Parking like a human: a direct trajectory planning solution, IEEE Transactions on Intelligent Transportation Systems, no. 99, pp. 1−10, Apr. 2017.
[7] F.-Y. Wang, Toward a paradigm shift in social computing: The ACP approach, IEEE Intelligent Systems, vol.22, no.5, pp.65−67, Sept.-Oct. 2007.
作者简介

李力 清华大学自动化系副教授. 主要研究方向为人工智能和机器学习, 智能交通系统和智能汽车. E-mail: li-li@tsinghua.edu.cn

林懿伦 中国科学院自动化研究所复杂系统管理与控制国家重点实验室博士研究生. 主要研究方向为社会计算,智能交通系统, 智能汽车, 深度学习和强化学习. E-mail: linyilun2014@ia.ac.cn

郑南宁 西安交通大学人工智能与机器人研究所教授.中国工程院院士.主要研究方向为模式识别与智能系统,机器视觉与图象处理. Email:nnzheng@mail.xjtu.edu.cn
王飞跃 中国科学院自动化研究所复杂系统管理与控制国家重点实验室研究员. 国防科学技术大学军事计算实验与平行系统技术研究中心主任. 主要研究方向为智能系统和复杂系统的建模、分析与控制. 本文通信作者. E-mail: feiyue.wang@ia.ac.cn
来源:JAS自动化学报英文版