CVPR2019 | 斯坦福学者提出GIoU,目标检测任务的新Loss
作者 | Slumbers,毕业于中山大学,深度学习工程师,主要方向是目标检测,语义分割,GAN
责编 | Jane
本文是对 CVPR2019 论文《Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression》的解读,通过对 Loss 的修改提升检测任务的效果,觉得思路很棒。
该文作者来自斯坦福大学与澳大利亚阿德莱德大学。
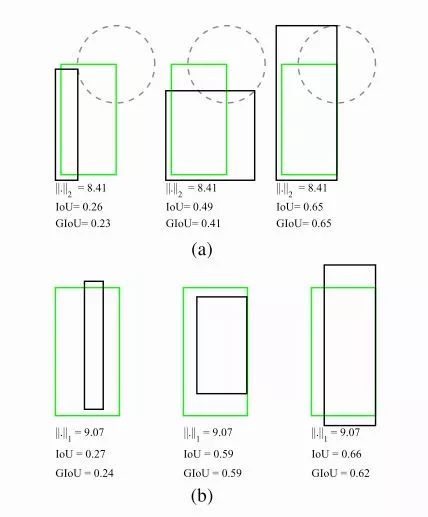
IoU是检测任务中最常用的指标,由于IoU是比值的概念,对目标物体的scale是不敏感的。然而检测任务中的BBox的回归损失(MSE loss, l1-smooth loss等)优化和IoU优化不是完全等价的(见下图)。
而且 Ln 范数对物体的scale也比较敏感。这篇论文提出可以直接把IoU设为回归的loss。然而有个问题是IoU无法直接优化没有重叠的部分。为了解决这个问题这篇paper提出了GIoU的思想~
IoU与L2范数的优化不是等效的。要将IoU设计为损失,主要需要解决两个问题:
预测值和Ground truth没有重叠的话,IoU始终为0且无法优化
IoU无法辨别不同方式的对齐,比如方向不一致等。
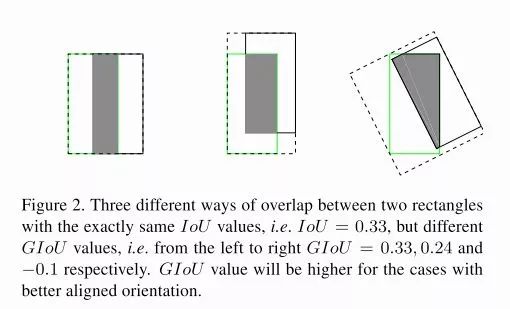
IoU 无法代表 overlap 的方式
GIoU
所以论文中提出的新 GIoU 是怎么设计的呢:
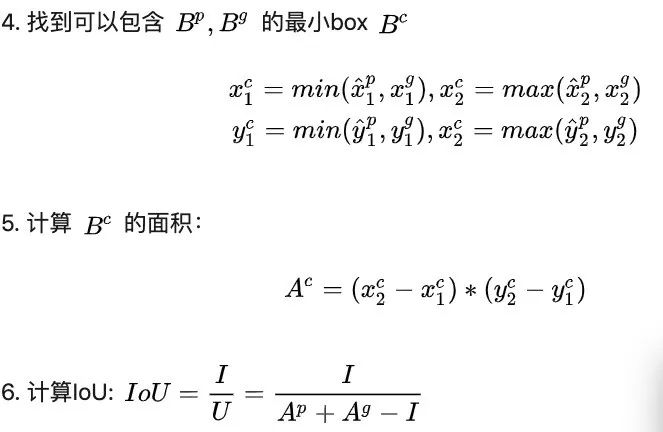
假如现在有两个任意性质 A,B,我们找到一个最小的封闭形状C,让C可以把A,B包含在内,然后我们计算C中没有覆盖A和B的面积占C总面积的比值,然后用A与B的IoU减去这个比值:
GIoU有如下性质:
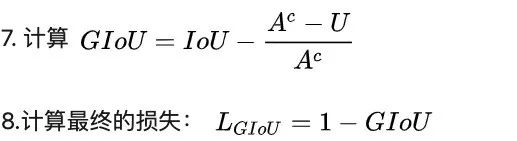
与IoU类似,GIoU也可以作为一个距离,loss可以用 (下面的公式)来计算
同原始 IoU 类似,GIoU 对物体的大小不敏感。GIoU 总是小于等于 IoU,对于 IoU,有
GIoU 则是
在两个形状完全重合时,有

由于 GIoU 引入了包含 A,B 两个形状的 C,所以当 A,B 不重合时,依然可以进行优化。
总之就是保留了IoU的原始性质同时弱化了它的缺点。于是论文认为可以将其作为IoU的替代。
GIoU 作为 BBox 回归的损失
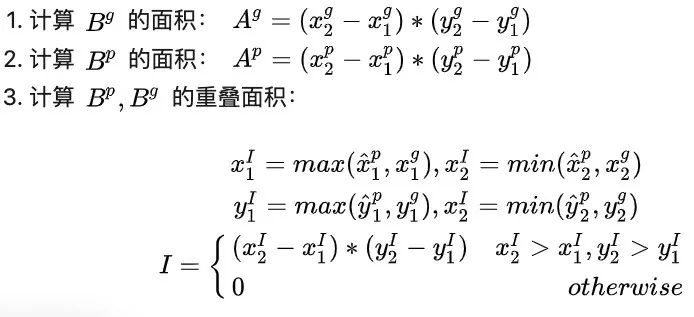
具体一点,如何计算损失呢?我们以 2D detecation 为例:
假设我们现在有预测的 Bbox 和 groud truth 的 Bbox 的坐标,分别记为:

注意我们规定对于预测的 BBox 来说,有
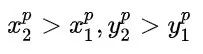
主要是为了方便之后点的对应关系。
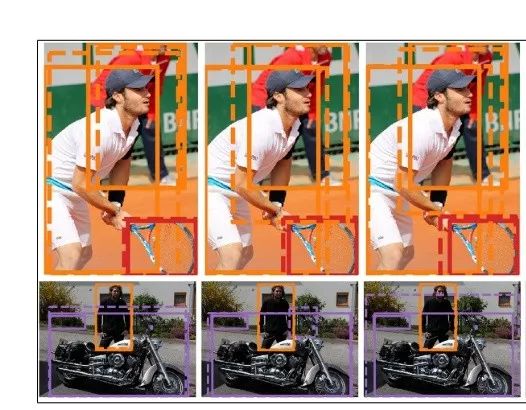
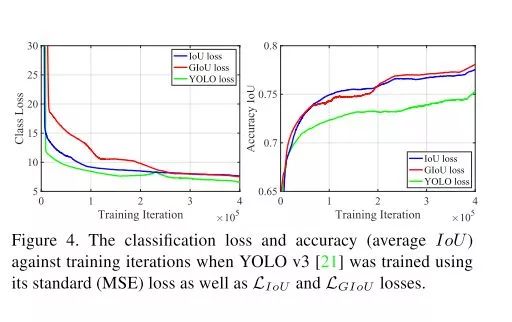
作者做了一系列的实验(针对分割任务和分类任务有一定 loss 的调整设计,不过论文中没有详细给出)结果是 IoU loss 可以轻微提升使用 MSE 作为 loss 的表现,而 GIoU 的提升幅度更大,这个结论在 YOLO 算法和 faster R-CNN 系列上都是成立的:
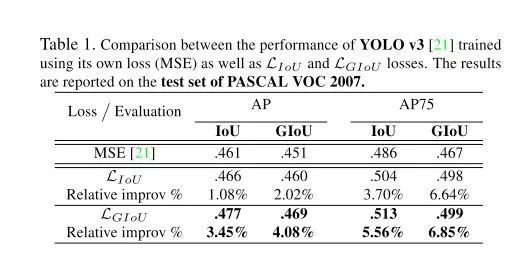
PASCAL VOC 2007上的提升with Yolo
MS COCO的提升with Yolo
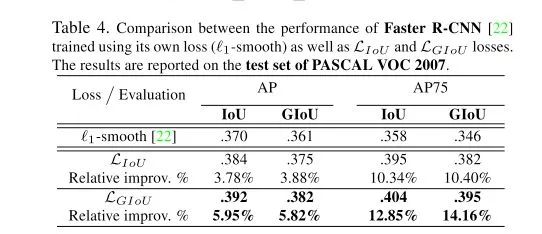
PASCAL VOC 2007 with faster-RCNN
更多内容大家可以参考项目主页:
https://giou.stanford.edu/
代码实现:
https://github.com/generalized-iou
原文链接:
https://zhuanlan.zhihu.com/p/57992040
--【本文完】--
近期 CVPR 2019 论文解读推荐:
CVPR 2019审稿满分论文:中国博士提出融合CV与NLP的视觉语言导航新方法
CVPR 2019 | 惊艳的SiamMask:开源快速同时进行目标跟踪与分割算法
CVPR2019 | 微软、中科大开源基于深度高分辨表示学习的姿态估计算法
如果你也想分享自己的论文,欢迎投稿,可扫描下方二维码与营长联系:

(本文为AI科技大本营转载文章,转载请微信作者)
推荐阅读:

❤点击“阅读原文”,查看历史精彩文章。


