
End-to-End Object Detection with Transformers
论文:https://arxiv.org/abs/2005.12872
代码:https://github.com/facebookresearch/detr

本文已提交至ECCV 2020,作者团队:Facebook AI Research。FAIR提出DETR:基于Transformers的端到端目标检测,没有NMS后处理步骤、真正的没有anchor,直接对标且超越Faster R-CNN,代码刚刚开源!
注:开源24小时,star数已高达700+!
简介
本文提出了一种将目标检测视为direct set直接集合预测问题的新方法。我们的方法简化了检测流程,有效地消除了对许多手工设计的组件的需求,例如非极大值抑制(NMS)或锚点生成,这些组件明确编码了我们对任务的先验知识。
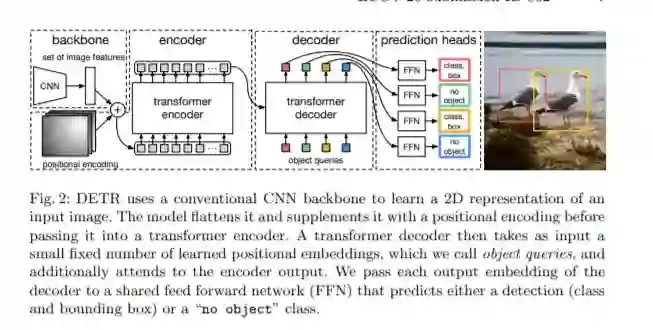
这种称为Detection Transformer或DETR的新框架的主要组成部分是基于集合的全局损失函数,该损失函数通过二分匹配和transformer编码器-解码器体系结构强制进行唯一的预测。给定一个固定的学习对象查询的小集合,DETR会考虑目标对象与全局图像上下文之间的关系,并直接并行输出最终的预测集合。
与许多其他现代检测器不同,新模型在概念上很简单,并且不需要专门的库。DETR与具有挑战性的COCO对象检测数据集上公认的且高度优化的Faster R-CNN baseline具有同等的准确性和运行时性能。此外,可以很容易地将DETR迁移到其他任务例如全景分割。
本文的Detection Transformer(DETR,请参见图1)可以预测所有物体的剧烈运动,并通过设置损失函数进行端到端训练,该函数可以在预测的物体与地面真实物体之间进行二分匹配。DETR通过删除多个手工设计的后处理过程例如nms,对先验知识进行编码的组件来简化检测流程。与大多数现有的检测方法不同,DETR不需要任何自定义层,因此可以在包含标准CNN和转换器类的任何框架中轻松复制。
DETR的主要特征是二分匹配损失和具有(非自回归)并行解码的Transformer的结合。
