DIoU YOLOv3 | AAAI 2020:更加稳定有效的目标框回归损失
加入极市专业CV交流群,与6000+来自腾讯,华为,百度,北大,清华,中科院等名企名校视觉开发者互动交流!更有机会与李开复老师等大牛群内互动!
同时提供每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流。关注 极市平台 公众号 ,回复 加群,立刻申请入群~
DIoU要比GIou更加符合目标框回归的机制,将目标与anchor之间的距离,重叠率以及尺度都考虑进去,使得目标框回归变得更加稳定,不会像IoU和GIoU一样出现训练过程中发散等问题。
论文标题:
Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression(已经被AAAI2020接收)
https://arxiv.org/pdf/1911.08287.pdf
https://github.com/Zzh-tju/DIoU-darknet
IoU & GIoU存在的问题分析
-
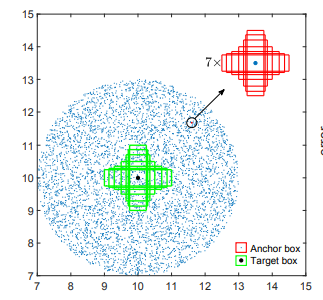
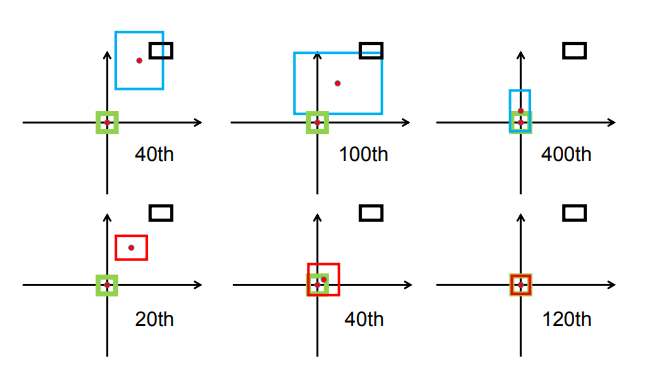
绿色框代表仿真实验需要回归的七个不同尺度的目标框,七个目标框的中心点坐标都是(10 * 10)。 -
蓝色的点代表了所有anchor的中心点,中心点的分布如下图所示,各个方向都有,各种距离都有,当然每个anchor的一个中心点都包含有七个不同面积的anchor框。 而且每个面积的anchor框又有其中不用比例尺寸。 因此一共有5000个蓝色点,有5000*7*7个anchor框,而且每个框都需要回归到七个目标框去,因此一共有5000*7*7*7个回归案例。
-
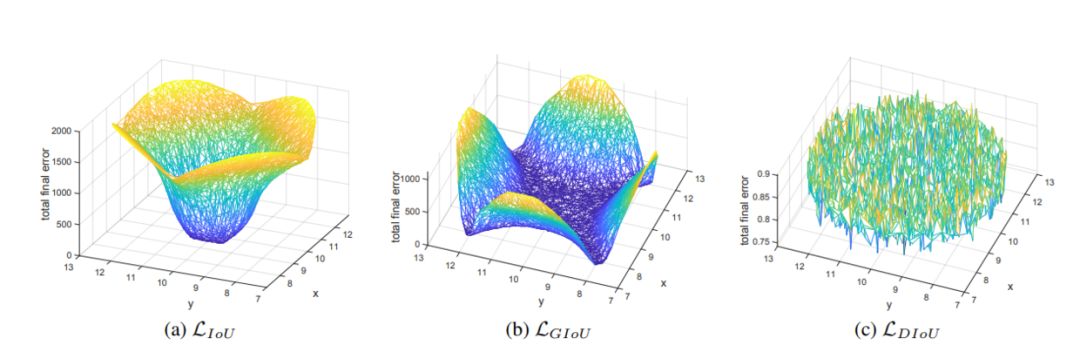
IoU: 从IoU误差的曲线我们可以发现,anchor越靠近边缘,误差越大,那些与目标框没有重叠的anchor基本无法回归。 -
GIoU: 从GIoU误差的曲线我们可以发现,对于一些没有重叠的anchor,GIoU的表现要比IoU更好。 但是由于GIoU仍然严重的依赖IoU,因此在两个垂直方向,误差很大,基本很难收敛,这就是GIoU不稳定的原因。 -
DIoU: 从DIoU误差的曲线我们可以发现,对于不同距离,方向,面积和比例的anchor,DIoU都能做到较好的回归。

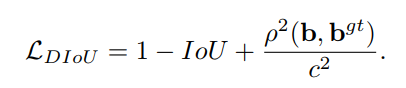
作者为了回答第一个问题:提出了Distance-IoU Loss。
-
与GIoU loss类似,DIoU loss在与目标框不重叠时,仍然可以为边界框提供移动方向。 -
DIoU loss可以直接最小化两个目标框的距离,因此比GIoU loss收敛快得多。 对于包含两个框在水平方向和垂直方向上这种情况,DIoU损失可以使回归非常快,而GIoU损失几乎退化为IoU损失。
DIoU还可以替换普通的IoU评价策略,应用于NMS中,使得NMS得到的结果更加合理和有效。
问题2答案:CIoU
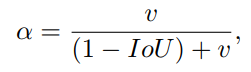
作者认为一个好的目标框回归损失应该考虑三个重要的几何因素:重叠面积、中心点距离、长宽比。
GIoU:为了归一化坐标尺度,利用IoU,并初步解决IoU为零的情况。
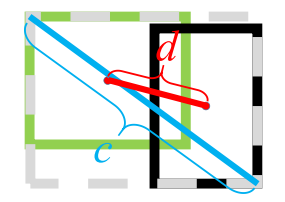
DIoU:DIoU损失同时考虑了边界框的重叠面积和中心点距离。
然而,anchor框和目标框之间的长宽比的一致性也是极其重要的。基于此,作者提出了Complete-IoU Loss。


-End-
*延伸阅读
极市目标检测方向交流群
添加极市小助手微信(ID : cv-mart),备注:研究方向-姓名-学校/公司-城市(如:目标检测-小极-北大-深圳),即可申请加入极市目标检测交流群(已经添加小助手的好友直接私信),更有每月大咖直播分享、真实项目需求对接、干货资讯汇总,行业技术交流,一起来让思想之光照的更远吧~

△长按添加极市小助手

△长按关注极市平台
觉得有用麻烦给个在看啦~