【泡泡一分钟】无人机对网络物理攻击的跨层改造
每天一分钟,带你读遍机器人顶级会议文章
标题:Cross-Layer Retrofitting of UAVs Against Cyber-Physical Attacks
作者:Fan Fei, Zhan Tu, Ruikun Yu, Taegyu Kim, Xiangyu Zhang, Dongyan Xu, and Xinyan Deng
来源:
编译:章绩伟
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

作为一个快速发展的网络物理平台,无人机在其功能和应用不断扩展时面临着更多的安全威胁。具有无人机详细知识的对抗者可以造成无人机控制系统不易检测或处理的复杂攻击。在本项研究工作中,我们的目标是构建一个称为BlueBox的通用安全框架,它能够检测和处理各种网络物理攻击。为了展示BlueBox在实践中的应用,我们改进了现有的四轴飞行器。然后通过在控制软件中嵌入恶意代码并通过传感器、控制器、电机、无人机动力学和操作系统的特定目标来改变无人机的硬件,从而发起了一系列攻击。实验结果证实,BlueBox能够检测各种网络物理攻击,同时还提供从此类攻击中恢复的方法。

图1 BlueBox图。蓝色阴影内的组件将在外部硬件上实现。BlueBox读取命令参考,控制器输出,原始传感器数据和传感器融合结果.BlueBox不被原始系统访问,并且只能控制车辆的驱动。
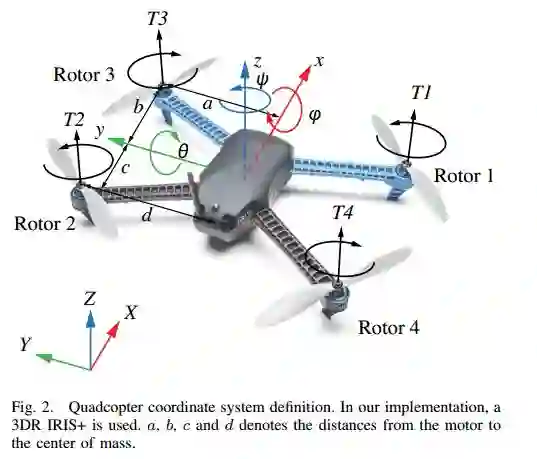
图2 四轴坐标系定义。在我们的实现中使用3DR IRIS +, a、b、c和d表示从电动机到质量中心的距离。
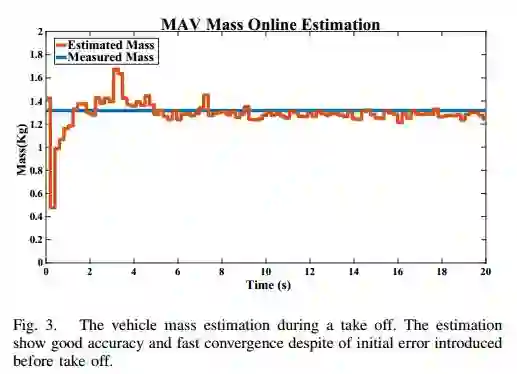
图3 起飞过程中的车辆质量估算。尽管在起飞前引入了初始误差,但估计显示出良好的准确性和快速收敛。

图4 图a)描述了在BlueBox停用的传感器攻击下四轴飞行器的性能。当触发传感器攻击时,从传感器融合结果向滚动角添加3度偏移。没有BlueBox保护,车辆在负x方向漂移。图b)显示BlueBox处于活动状态时,一旦启动传感器攻击,就会在0.5秒内触发保护。黄色区域表示传感器攻击的检测标志。车辆保持其位置,如x-y图所示。

图5 图a)描述了在禁用BlueBox的情况下控制攻击下四轴飞行器的性能。图b)描述了在激活BlueBox的情况下控制攻击下四轴飞行器的性能。在这两种情况下,为了测试四轴飞行器的安全性,控制增益仅乘以2。当检测到攻击时,BlueBox冗余控制器将接管四轴飞行器。在图a)中(BlueBox处于非活动状态),攻击持续了大约10秒钟。四轴飞行器将相应地振荡并显示控制输出差异。在受保护的情况下(BlueBox处于活动状态),检测显示一些误报,因为当四轴飞行器接近稳定时控制输出之间的差异很小。
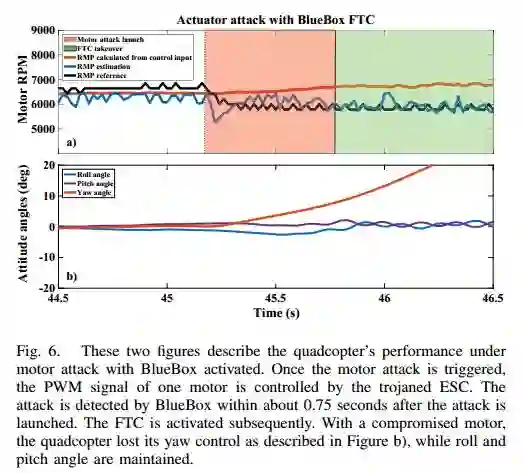
图6 这两个数字描述了四轴飞行器在激活BlueBox的情况下在电机攻击下的性能。一旦触发了电机攻击,一个电机的PWM信号由特洛伊的ESC控制。攻击发起后约75秒内,BlueBox会检测到攻击。FTC随后被激活。如果电动机受损,则四轴飞行器失去其偏航控制,如图b)所示,同时保持侧倾和俯仰角。

图7 该图描述了动力学攻击的检测。一旦附加了额外的有效载荷,沿z轴的速度估计将与实际速度不同。然后引发攻击检测标志,并由BlueBox接管控制。在实际设置中,BlueBox可以将四轴飞行器驱动回起点或直接启动着陆。在此测试案例中,未采取任何具体措施。
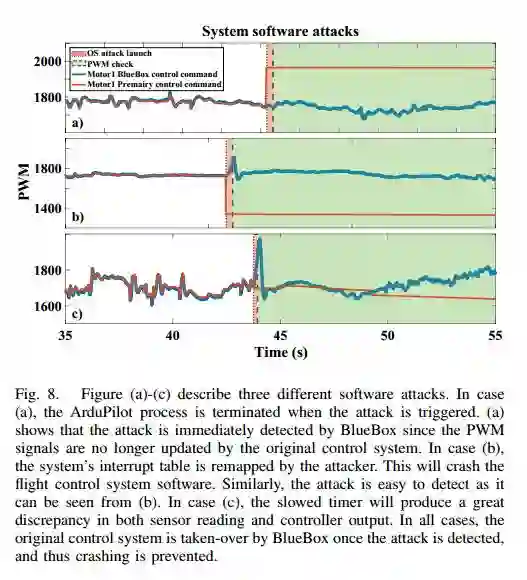
图8 图(a)-(c)描述了三种不同的软件攻击。在情况(a)中,当触发攻击时终止ArduPilot进程。(a)表明BlueBox立即检测到攻击,因为原始控制系统不再更新PWM信号。在情况(b)中,攻击者重新映射系统的中断表。这将使飞行控制系统软件崩溃。同样,从(b)可以看出攻击很容易被发现。在情况(c)中,减速计时器将在传感器读数和控制器输出中产生很大的差异。在所有情况下,一旦检测到攻击,原始控制系统就被BlueBox接管,从而防止了崩溃。

Abstract
As a rapidly growing cyber-physical platform, unmanned aerial vehicles are facing more security threats as their capabilities and applications continue to expand. Adversaries with detailed knowledge about the vehicle could orchestrate sophisticated attacks that are not easily detected or handled by the vehicle’s control system. In this work, we purpose a generic security framework, termed BlueBox, capable of detecting and handling a variety of cyber-physical attacks. To demonstrate an application of BlueBox in practice, we retrofitted an offthe-shelf quadcopter. A series of attacks were then launched by embedding malicious code in the control software and by altering the vehicle’s hardware with the specific targeting of sensors, controller, motors, vehicle dynamics, and operating system. Experimental results verified that BlueBox was capable of both detecting a variety of cyber-physical attacks, while also providing the means in which to recover from such attacks.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:f4sv
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



