【泡泡一分钟】基于增量分割的三维点云定位方法
每天一分钟,带你读遍机器人顶级会议文章
标题:Incremental Segment-Based Localization in 3D Point Clouds
作者:Renaud Dubé, Mattia G. Gollub, Hannes Sommer, Igor Gilitschenski,Roland Siegwart, Cesar Cadena, and Juan Nieto
来源:IEEE Robotics and Automation Letters 2018
播音员:SophieChu
编译:蔡纪源
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——基于增量分割的三维点云定位方法,该文章发表于RAL2018。
由于从三维数据中提取信息是非常复杂的,因此要在3D点云中的实现定位是一项极具挑战性的任务。本文作者引入了增量分割的方法,有效的解决了这个难题。如下图1所示,橙色的线代表车辆自右向左行使的轨迹。通过分段分割的方式,在t=2时刻,车辆能够通过分割的一致性(绿线)实现自身的全局定位。
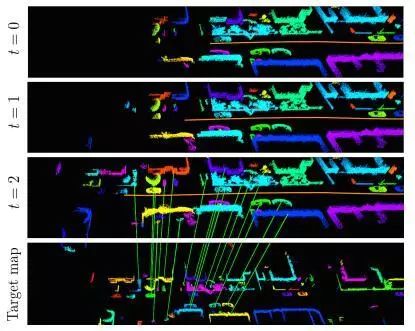
图1 本文增量方法的示例
如图2所示,在本文中,首先将测量结果的点和姿态等数据累积在动态体素网格中,并有选择性地更新点法线。其次,如图3所示,基于区域增长的增量分割算法,可以跟踪单个分段的演变,根据几何一致性的划分和缓存,可以实现有效的识别策略。
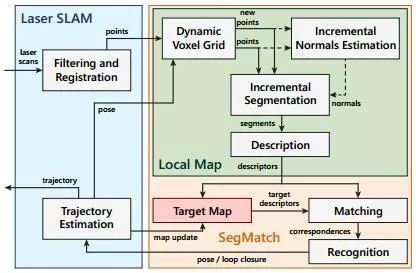
图2 增量分割匹配原理与激光SLAM框架图
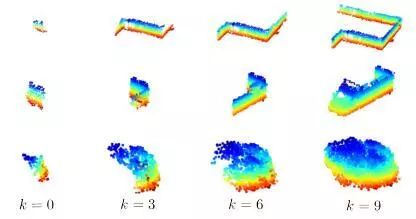
图3 基于区域增长的增量分割算法
最后,作者证明了该增量方法可以在城市驾驶环境中以10Hz实现全局定位,相比批处理方法而言,速度提高了x7.1倍。如图4、图5所示,不同的实验数据充分说明了作者提出的方法的效率足以适用于需要实时定位的应用,同时也适用于廉价、低功耗的系统。
作者目前已经将代码开源,与系统说明一同发布在https://github.com/ethz-asl/segmatch,相关视频介绍请参见https://youtu.be/cHfs3HLzc2Y 。
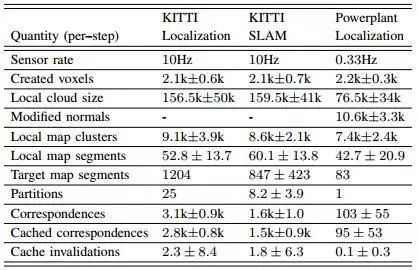
图4 不同实验条件下本文方法的结果
基于均值和标准差等统计特性分析
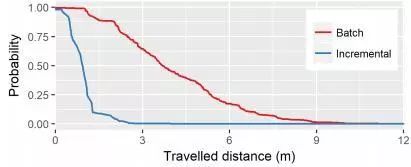
图5 行使距离与定位失败概率的对比图

Abstract
Localization in 3D point clouds is a highly challenging task due to the complexity associated with extracting information from 3D data. This paper proposes an incremental approach addressing this problem efficiently. The presented method first accumulates the measurements in a dynamic voxel grid and selectively updates the point normals affected by the insertion. An incremental segmentation algorithm, based on region growing, tracks the evolution of single segments which enables an efficient recognition strategy using partitioning and caching of geometric consistencies. We show that the incremental method can perform global localization at 10Hz in a urban driving environment, a speedup of x7.1 over the compared batch solution. The efficiency of the method makes it suitable for applications where real–time localization is required and enables its usage on cheaper, low–energy systems. Our implementation is available open source along with instructions for running the system. The implementation is available at https://github.com/ethz-asl/segmatch and a video demonstration is available at https://youtu.be/cHfs3HLzc2Y
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com