新型高灵敏度传感器:芯片上的玻璃“泡泡”!
导读
最近,美国宾夕法尼亚州立大学的电气工程师们开发出一种光学回音壁模式的谐振器,它能够将光线沿着微型小球的圆周旋转数百万次,创造出一种基于微芯片的超敏感传感器,带来多种应用。
背景
英国伦敦圣保罗大教堂回音壁的效果让人印象深刻,即使是来自很远处的耳语声,也可以听得很清楚。也许,我们不禁会问这是为什么?答案就是:声波不断地沿着弯曲且光滑的墙面进行反射,损耗得很少。

(图片来源:维基百科)
创新
然而,有一项创新成果与这个回音壁的效果有异曲同工之妙。最近,美国宾夕法尼亚州立大学的电气工程师们开发出一种光学回音壁模式的谐振器,它能够将光线沿着微型小球的圆周,旋转数百万次,创造出一种基于微芯片的超敏感传感器,带来多种应用。
为了了解这些球的品质,Tadigadapa 的博士研究生 Chenchen Zhang 以及最近博士毕业的 Eugene Freeman,与明尼苏达大学实验室的激光专家、电气工程教授 Zhiwen Liu 的博士生 Alexander Cocking 一起展开了工作。
在线发表于11月2日的开放期刊《科学报告》(Scientific Reports)杂志的论文的领导作者 Zhang 如此描述他们的研究:
“我们制成泡泡,然后将它们带到Liu博士的实验室,获取共振能级并进行测量。”
技术
电气工程教授 Srinivas Tadigadapa 表示:
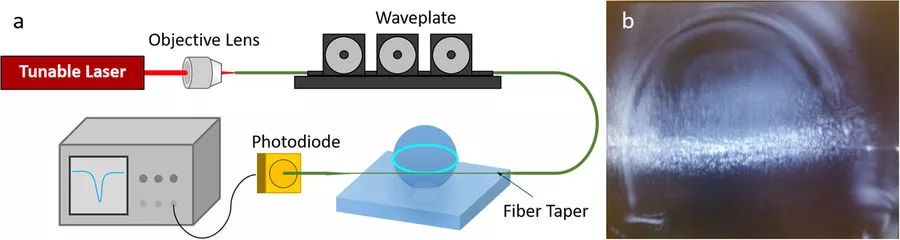
“回音壁模式的谐振器,从根本上说就是光学谐振器,相关研究至少已有20年。人们已经做到的就是,采用一种光学纤维,并用喷灯接触其一端。当熔化的纤维重新凝固时,在其一端形成一个圆球。这样就可以连接到光源,并制成一个传感器。
然而,那种传感器由固体球组成,无法兼容微制造技术。但是,最近 Tadigadapa 与其团队开发出一种创新方法,生长出在芯片上的、高灵敏度的玻璃微球壳,用于感知运动、温度、压力、生物化学指标。
(图片来源:参考资料【2】)
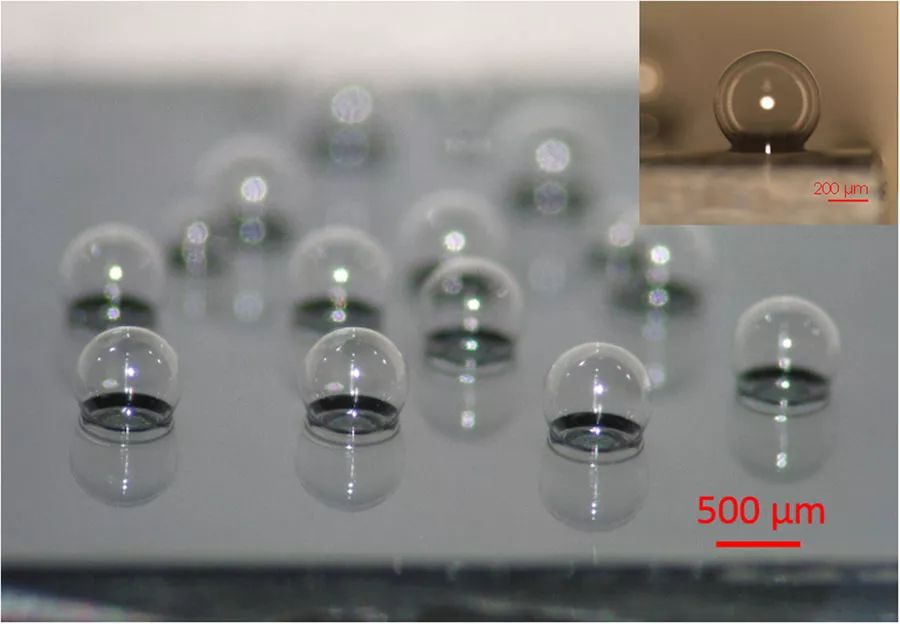
这种空心硼硅酸盐玻璃是通过被蚀刻到硅衬底中的、密封加压的圆柱形空腔膨胀而成。使用玻璃吹制技术,这种薄的玻璃晶片,可在高温和外部真空压力下,形成几乎完美的泡泡。研究人员让这一组球的直径从230微米生长到1.2毫米,壁的厚度从300纳米生长到10微米。
(图片来源:参考资料【2】)
Tadigadapa 表示:
“球的底部变薄,直到形成一个洞为止。你可以将光线打到球的外部,但是所有的化学反应都发生在壳的内壁。你可以把任何你想要辨别的分析物带进来,但是它在内表面进行。这样带来了许多可能性。你可以进行化学感知、生物物理感知、压力感知和真正很棒的温度感知。”
经历许多失败的尝试以后,团队发现制造高质量传感器关键在于:确保赤道面(它的中心)高于芯片的表面。
价值
这项成果对于用于感知疾病的芯片实验室生物物理传感来说,具有特别显著的意义。
Zhang 表示:
“或者在泡泡的内部添加聚合物涂层,你可以获取真正敏感的湿度传感器。”
Tadigadapa 补充说:
“还存在一些真正激动人心的可能性,我想它将引发大量的后续研究。”
参考资料
【1】http://news.psu.edu/story/491940/2017/11/02/chip-based-sensors-incredible-sensitivity
【2】Chenchen Zhang, Alexander Cocking, Eugene Freeman, Zhiwen Liu, Srinivas Tadigadapa. On-Chip Glass Microspherical Shell Whispering Gallery Mode Resonators. Scientific Reports, 2017; 7 (1) DOI: 10.1038/s41598-017-14049-w

了解更多前沿技术文章,请点击“阅读原文”。咨询和交流,请联系微信:JohnZh1984。





