Fusion++| 体素物体级SLAM
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
本文转自江佩视觉LAB
标题:Fusion++: Volumetric Object-Level SLAM
作者:John Mccormac; Ronald Clark; Michael Bloesch; Andrew Davison; Stefan Leutenegger
来源:2018 International Conference on 3D Vision (3DV)
编译:wyc
摘要
我们提出了一个在线的对象级SLAM系统,它可以建立一个持久的、精确的任意重建对象的三维图形地图。当一台RGB-D相机浏览一个杂乱的室内场景时,利用MASK RCNN实例分段初始化每个对象的压缩截断有符号距离函数(TSDF)重构,该重构具有与对象大小相关的分辨率和一个新的3D前景蒙版。重建对象存储在一个优化的6自由度姿态图,这是我们唯一的持久地图表示。对象通过深度融合逐步细化,并用于跟踪、重新定位和循环关闭检测。循环关闭会导致对象实例的相对姿态估计发生调整,但不会导致对象内部扭曲。每个对象还携带语义信息,这些信息会随着时间的推移而被细化,并且存在的概率会解释虚假的实例预测。
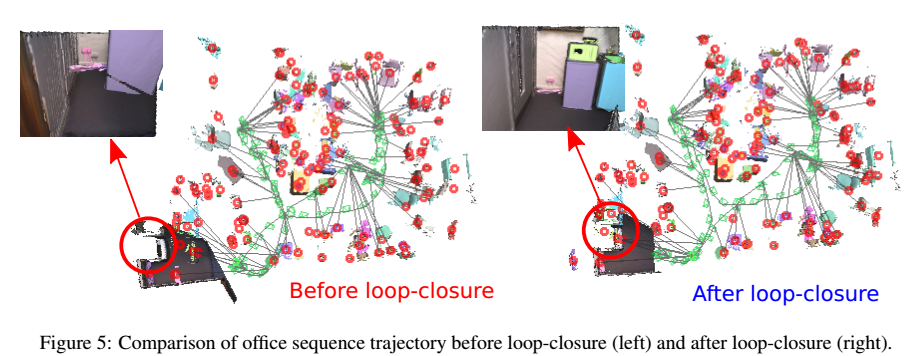
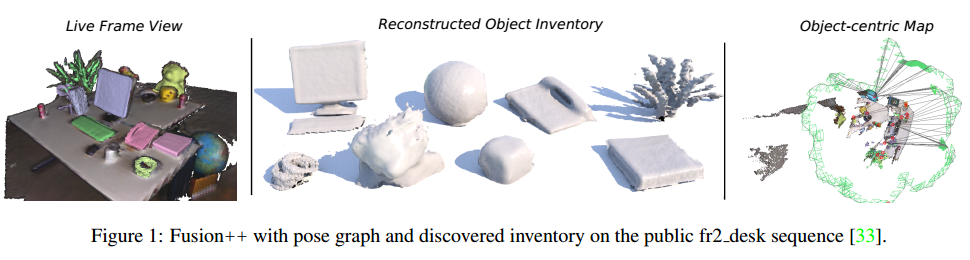
我们在一个手持的RGB-D序列上演示了我们的方法,该序列来自一个杂乱无章的办公室场景,其中包含大量和多种对象实例,强调了系统如何关闭循环,以及如何在重复循环中充分利用现有对象。我们根据rgbd slam基准上的基线方法定量评估系统的轨迹误差,并定性比较ycb视频数据集上发现物体的重建质量。性能评估表明,我们的方法具有很高的内存效率,并且在4-8Hz(不包括重新定位)下在线运行,尽管在软件级别没有进行优化。
贡献
1.一个通用的面向对象的SLAM系统,它将映射作为可变分辨率的3D实例重建。
2.每帧实例检测使用体素前景遮罩进行牢固融合,丢失的检测使用“存在”概率进行解释。
3.我们在全局一致的循环闭合对象SLAM图中显示了高质量的对象重建。
方法
我们已经在真实、杂乱的室内场景中显示了许多以前未知形状的对象的一致实例映射和分类。我们的在线和近实时系统是由基于图像的实例分割、TSDF融合和跟踪以及姿势图优化模块构建的,它可以制作一个长期的地图,重点关注具有可变对象大小相关分辨率的场景中最重要的对象元素。从rgb-d输入,粗背景tsdf初始化为本地跟踪和闭塞处理。如果姿态变化足够大或系统丢失,则执行重新定位和图形优化以到达新的摄像机位置,粗TSDF复位。在单独的线程中,rgb帧由mask r-cnn处理,检测被过滤并与现有地图匹配。
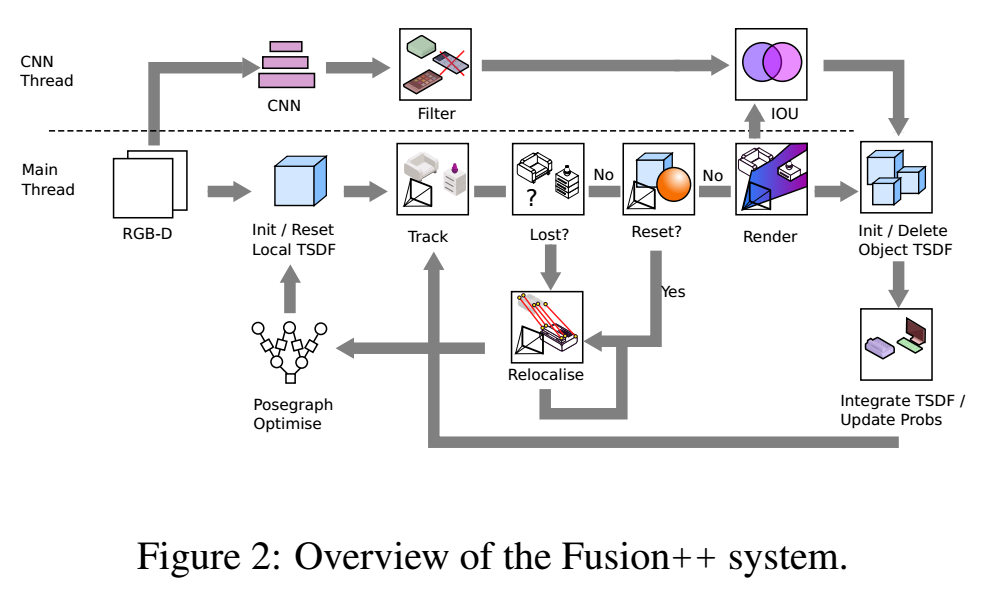
当没有匹配发生时,新的TSDF对象实例被创建、调整大小并添加到地图中,以进行本地跟踪、全局图优化和重新定位。在未来的帧中,相关的前景检测与语义和存在概率一起融合到对象的3D“前景”蒙版中。是否属于同一个体判别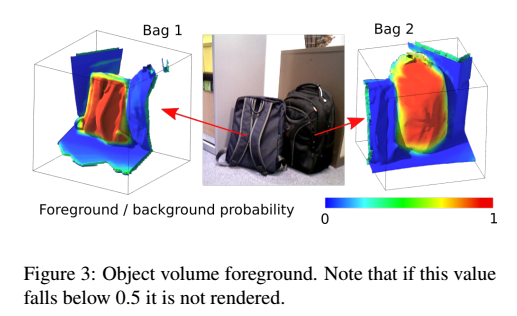
实验
1.重建质量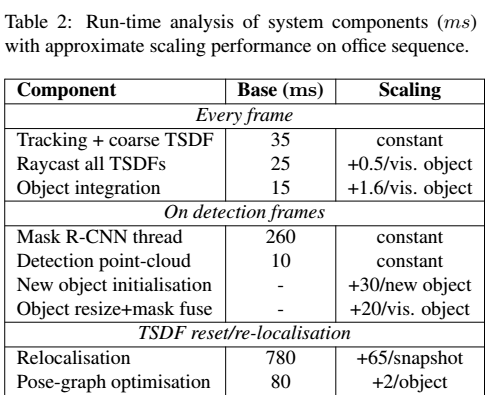
3.系统运行状况
从0到1学习SLAM,戳↓

交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~
投稿、合作也欢迎联系:simiter@126.com

扫描关注视频号,看最新技术落地及开源方案视频秀 ↓




