【泡泡图灵智库】DELIGHT:使用LiDAR反射强度进行全局定位的高效描述符(ICRA)
泡泡图灵智库,带你精读机器人顶级会议文章
标题:DELIGHT: An Efficient Descriptor for Global Localisation using LiDAR Intensities
作者:Konrad P Cop, Paulo V K Borges, and Renaud Dub´e
来源:ICRA 2018
编译:黄文超
审核:杨小育
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是DELIGHT:使用LiDAR反射强度进行全局定位的高效描述符。
地点识别是移动机器人的关键要素。它可以帮助解决机器人定位的“唤醒”和“绑架”问题,在这些问题中需要在没有先验信息的情况下估计机器人位置。在可用于此种任务的不同传感器(例如,相机,GPS,LiDAR)中,LiDAR具有能够在黑暗和没有GPS信号的区域中正常运行的优点。作者提出了一种新方法,只使用LiDAR数据,并且可以在没有机器人运动信息的情况下执行。与其他方法相比,我们的系统利用到了激光反射强度信息(与仅使用距离信息相对),将其编码成LiDAR强度的描述符,作为一组直方图,名为DELIGHT。描述符编码周围强度的分布直方图,使用卡方检验进行比较。算法流程分为两个阶段,包括基于激光反射强度的先验估计和基于几何的验证。对于220k平方米的地图,该方法仅使用大约3s即可实现定位,成功率为97%,说明该方法在实际环境中的适用性。
主要贡献
1、提出了DELIGHT,一个基于激光雷达反射强度的全局定位描述符。
2、提出了一种基于DELIGHT描述符进行地点识别的方法。
3、提出了一种可靠且快速的仅使用激光雷达的全局定位解决方案,结合基于DELIGHT的识别和基于关键点的验证。
4、对提出的算法进行了详尽的验证,在真实世界的环境下解决机器人定位的“唤醒”问题。
算法流程
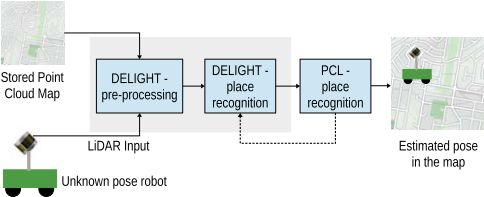
图1 系统架构。包含了基于DELIGHT的全局定位(灰色
部分)和基于PCL局部描述子的局部精确定位
DELIGHT描述子
除了距离信息外,激光雷达 LiDAR 还能够提供每个点的反射强度。一般在传感器标定之后,一个强度值就对应一种特性的表面。
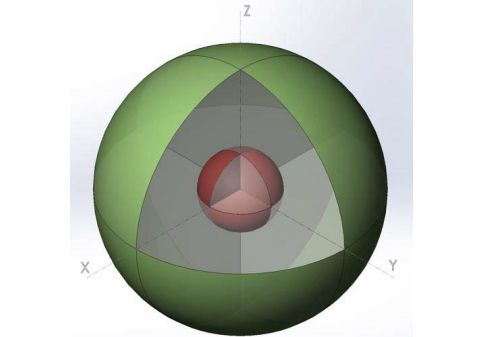
图2 DELIGHT描述子空间划分
如上图所示,DELIGHT 描述子由 m 个不互相重叠的区域组成:首先以激光雷达为中心,定义外围半径和内部半径,接着将球体划分为上下两个部分,最后横向的每90°划分一个区域,由此,m = 16。对于每个区域,落入该区域的 n 个点的强度值被计算成直方图,该直方图具有 b 个划分区域。(注:这个结构反映在描述子的名字中为:DEscriptor of LiDAR Intensities as a Group of HisTograms。)一个激光雷达帧的划分如下图所示。DELIGHT 是一个全局描述子,对每个点云,该描述子包含以激光雷达为中心的整个点云,不同颜色代表了对应的不同区域。
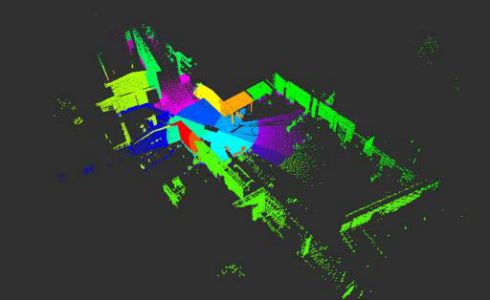
图3 对一个点云的划分示例
为了匹配两个不同的描述子,首先需要将它们对齐(即上对上,左对左等等),这样就需要有一个参考帧。作者使用了主成分分析PCA来建立参考帧。对齐了之后,对于描述子 A 的第 i 个区域,它与描述子 B 的第 i 个区域的相似性度量可以基于卡方测试定义为:

此外,由于激光雷达的采集密度以及某些对称的环境下,使用 PCA 来决定对齐方向有时会具有歧义。作者提出如下的方法来解决这个问题:根据 x 轴和 z 轴的划分总共有 4 种情况(不考虑 y 轴是因为方向可以由x,z轴的外积得到),使用(1)式计算 A 和 B 的相似度时,计算四个不同的值,取最小的那一个作为最后的结果。
全局定位流程
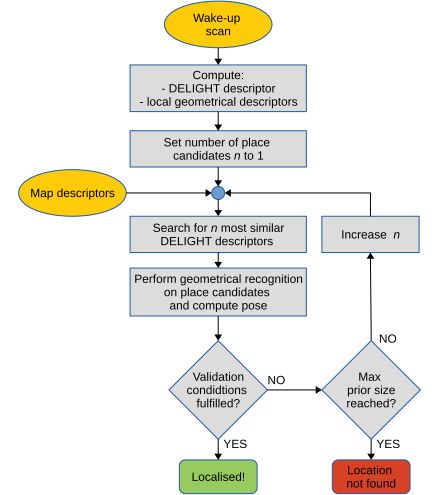
图5 全局定位流程
上图为全局定位流程。全局定位需要提供一个由 SLAM 获得的地图,根据 SLAM 的轨迹每 k 米划分片段,每个片段内所有可见的点创建一个点云,这样地图就自然划分为各个地点。对应的,局部的几何描述子也在这个阶段计算。
主要结果

图6 实验设备,其中 VLP-16旋转了45°
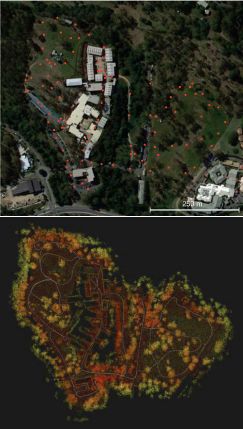
图7 实验环境。上图为卫星图,红点为“唤醒”的测试地点;
下图为点云地图,建图轨迹由白线标出
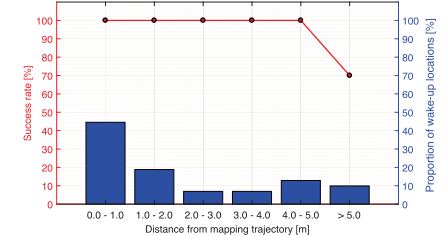
实验结果1 全局定位成功率(红色曲线)
其中蓝色表示定位地点中属于“唤醒”地点的百分比
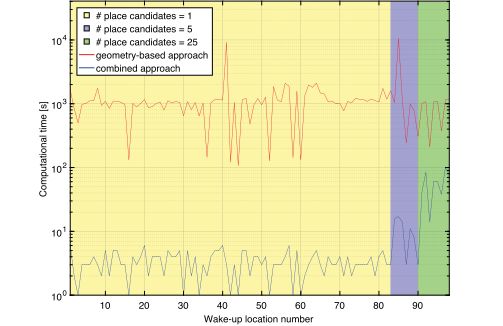
实验结果2 相比于纯几何的定位方法的算法运行时间比较
提取码: 7skv

Abstract
Place recognition is a key element of mobile robotics. It can assist with the “wake-up” and “kidnapped robot” problems, where the robot position needs to be estimated without prior information. Among the different sensors that can be used for the task (e.g., camera, GPS, LiDAR), LiDAR has the advantage of operating in the dark and in GPS-denied areas. We propose a new method that uses solely the LiDAR data and that can be performed without robot motion. In contrast to other methods, our system leverages intensity information (as opposed to only range information) which is encoded into a novel descriptor of LiDAR intensities as a group of histograms, named DELIGHT. The descriptor encodes the distributed histograms of intensity of the surroundings which are compared using chi-squared tests. Our pipeline is a two-stage solution consisting of an intensity-based prior estimation and a geometry-based verification. For a map of 220k square meters, the method achieves localisation in around 3s with a success rate of 97%, illustrating the applicability of the method in real environments.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



