代码开源!激光雷达 SLAM 的闭环检测:OverlapNet
点击上方“计算机视觉life”,选择“星标”
快速获得最新干货
最近,德国波恩大学Photogrammetry and Robotics Lab新开源了用于激光雷达SLAM中闭环检测的代码:OverlapNet,该工作已经被Proceedings of Robotics: Science and Systems (RSS)录用。其中第一作者为华人在读博士Xieyuanli Chen,他也是之前开源项目SuMa++: Efficient LiDAR-based Semantic SLAM 的第一作者。
开源项目
以下是新开源代码相关的论文、视频、代码、作者个人主页等信息
论文名称:OverlapNet: Loop Closing for LiDAR-based SLAM
论文下载:https://www.ipb.uni-bonn.de/wp-content/papercite-data/pdf/chen2020rss.pdf
代码链接:https://github.com/PRBonn/OverlapNet
作者个人主页:https://www.ipb.uni-bonn.de/people/xieyuanli-chen/
先来看下作者介绍的视频,了解一下该工作的主要内容
亮点
该开源项目主要亮点如下
-
无需先验位姿信息,解决在自动驾驶中3D LiDAR SLAM 的闭环检测问题。
-
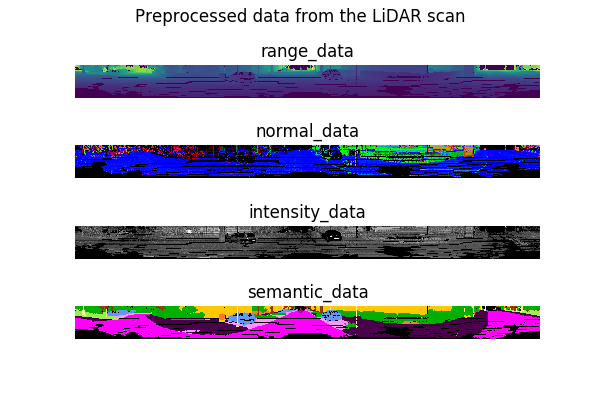
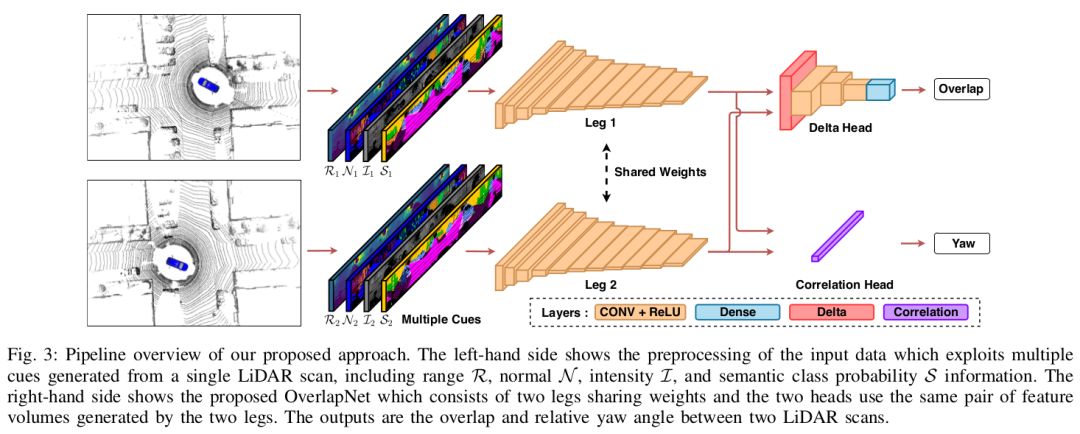
不需提前知道两个雷达扫描的相对位姿,只利用范围、法向量、强度和语义等线索,使用深度神经网络直接估计两个激光雷达扫描的重叠率,以及相对偏航角。
-
结合里程计信息和重叠率预测实现闭环的检测、修正。
-
可以检测到的闭环整合到现有SLAM系统中,可以提高整体位姿估计的结果,产生全局一致的地图。
-
可以在比较有挑战性的环境下估计回环信息。
-
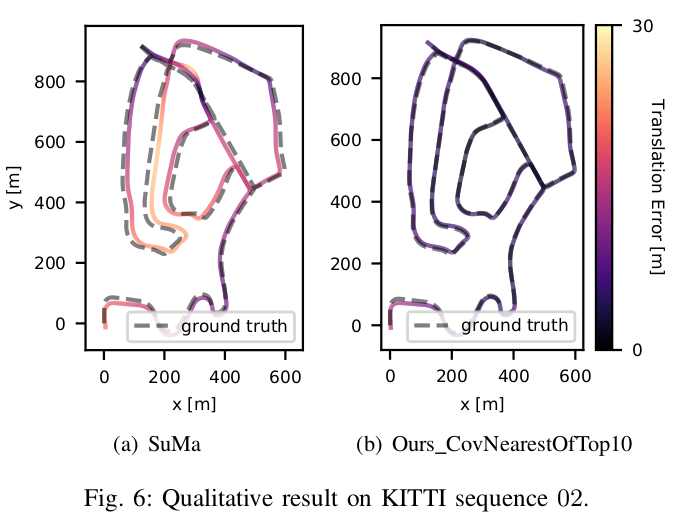
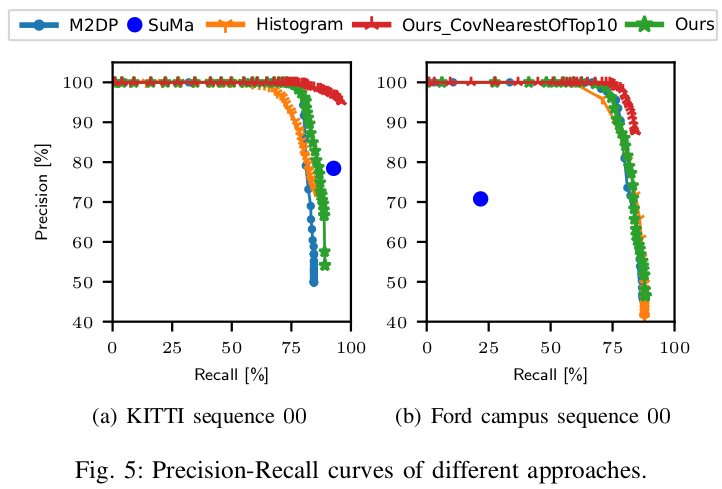
在不同数据集上泛化性能不错。作者训练模型使用的是 KITTI 数据集,在 Ford campus 数据集上进行测试评估。实验表明该方法仍然能够比最新的方法更有效地检测闭环。
更多论文内容参考之前的文章 最新论文 | 激光雷达 SLAM 的闭环检测:OverlapNet
从0到1学习SLAM,戳↓
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~

投稿、合作也欢迎联系:simiter@126.com

长按关注计算机视觉life
PS:公众号最近更改了推送规则,不再按时间顺序推送,而是根据智能推荐算法有选择性向用户推送,有可能以后你无法看到计算机视觉life的文章推送了。
解决方法是看完文章后,顺手点下文末右下角的“在看” ,系统会认为我们的文章合你口味,以后发文章就会第一时间推送到你面前的,比心~