牛逼哄哄的SLAM技术即将颠覆哪些领域
SLAM技术距今已有 30 余年的发展历史,但相比于深度学习、大数据等词汇,听过的人少之又少,国内从事相关研究的机构更是屈指可数。直至最近三年,SLAM才逐渐成为国内机器人和计算机视觉领域的热门研究方向,在当前比较热门的一些创业方向中崭露头角:
VR/AR 方面,根据 SLAM 得到地图和当前视角对叠加虚拟物体做相应渲染,这样做可以使得叠加的虚拟物体看起来比较真实,没有违和感;
无人机领域,SLAM可以构建局部地图,辅助无人机进行自主避障、规划路径;
无人驾驶领域, SLAM 技术可以提供视觉里程计功能,然后跟其他的定位方式融合;
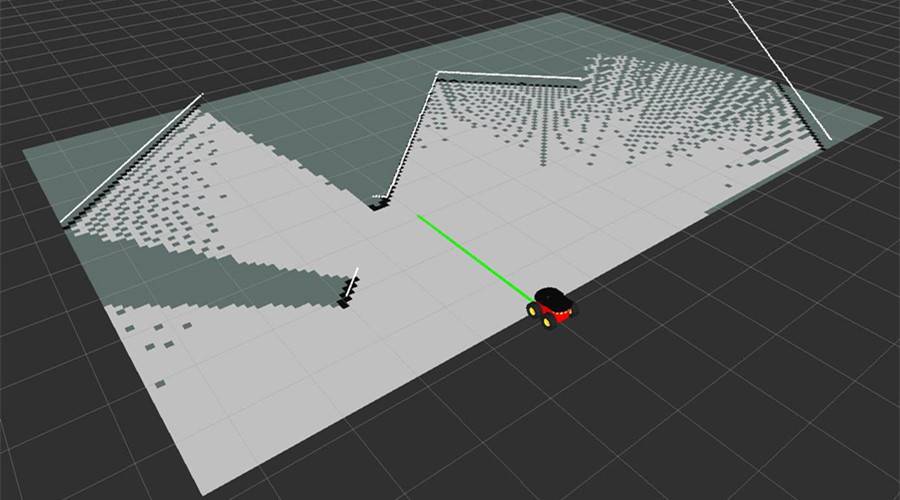
机器人定位导航领域,SLAM 可以用于生成环境的地图。基于这个地图,机器人执行路径规划、自主探索、导航等任务。
提起SLAM的重要性,有人说,SLAM是无人驾驶技术的灵魂;也有人曾打比方说,手机离开了WIFI和数据网络,就像无人车和机器人离开了SLAM一样。之所以没有受到广泛关注,主要原因在于这个方向难度很大,入门的门槛太高,具体来讲有以下几个原因:
1. 入门资料很少:虽然国内也有部分人在做,但这方面的中文资料几乎没有,入门教程匮乏,直至2017年4月《视觉SLAM十四讲:从理论到实践》的问世。
2. 难以实现:SLAM是一个完整的系统,由许多个分支模块组成。现在经典的方案是“图像前端,优化后端,闭环检测”的三部曲,很多文献看完了自己实现不出来。
3. 动手编程需要大量的先决知识:首先,你要会C和C++,网上很多代码还用了11标准的C++;第二,要会用Linux;第三,要会cmake,vim/emacs及一些编程工具;第四要会用openCV, PCL, Eigen等第三方库。只有学会了这些东西之后,你才能真正上手编一个SLAM系统。如果你要跑实际机器人,还要会ROS。
上述原因直接或者间接导致,国内SLAM技术人才稀缺,同时,机器人、无人机、无人驾驶、虚拟现实等企业的需求旺盛,供不应求的局面逐渐铺开。

困难多意味着收获也多,坎坷的道路才能锻炼人。鉴于SLAM技术入门困难,专注于前沿科技在线教育的深蓝学院,联合《视觉SLAM十四讲:从理论到实践》书籍作者高翔博士,推出《SLAM从理论到实践》在线系列课程,课程优秀学员可获得证书,并推荐到Momenta、地平线、图森未来、格林深瞳等知名企业实习就业。
课程讲师

高翔,慕尼黑工业大学博士后,清华大学自动化系博士,主编畅销书《视觉SLAM十四讲:从理论到实践》。长期从事SLAM(即时定位与地图构建)的研究,主要包括机器人的中的视觉SLAM技术、机器学习与SLAM的结合,在国际知名期刊 IEEE Transactions on Mechatronics、Robotics and Autonomous Systems、Autonomous Robots等发表论文数篇。
附:《视觉SLAM十四讲:从理论到实践》是国内第一本也是唯一一本专注于SLAM的书籍,现已成为国内入门SLAM的必备资料。
课程特色
1. 成熟的课程体系设置,从必备数学基础知识讲起;
2. 理论结合实践,降低入门门槛;
3. 课上在线答疑,课下微信群答疑;
4. 作业设置新颖,批阅讲解仔细;
5. 优秀学员颁发证书,推荐名企实习就业;
6. 课程PPT和源程序,会提前公开给学员。
课程目录
1. 概述与预备知识(2学时)
1.1 课程内容提要与预备知识
1.2 SLAM是什么
1.3 视觉SLAM数学表述与框架
1.4 Linux下的C++编程基础
1.5 实践:Hello SLAM
2. 三维空间的刚体运动(2学时)
2.1 点与坐标系
2.2 旋转矩阵
2.3 旋转向量与欧拉角
2.4 四元数
2.5 相似、仿射和射影变换
2.6 实践:Eigen矩阵运算
2.7 实践:Eigen几何模块
3. 李群与李代数(2学时)
3.1 群
3.2 李群与李代数
3.3 指数与对数映射
3.4 李代数求导与扰动模型
3.5 实践:Sophus李代数运算
4. 相机模型与非线性优化(2学时)
4.1 针孔相机模型与畸变
4.2 图像的组成
4.3 从状态估计到最小二乘
4.4 非线性优化与最小二乘法
4.5 实践:Ceres曲线拟合
4.6 实践:g2o曲线拟合
5. 特征点法视觉里程计(2学时)
5.1 特征点的提取与匹配
5.2 对极几何
5.3 三角测量
5.4 3D-2D:PnP
5.5 3D-3D:ICP
5.6 实践:ORB特征点
5.7 实践:PnP
5.8 实践:ICP
6. 直接法视觉里程计(2学时)
6.1 直接法的引出
6.2 光流
6.3 直接法
6.4 实践:LK光流
6.5 实践:RGB-D直接法
7. 后端优化(2学时)
7.1 滤波器
7.2 Bundle Adjustment与图优化
7.3 Pose Graph
7.4 Factor Graph
7.5 实践:Bundle Adjustment
7.6 实践:Pose Graph
8. 回环检测(2学时)
8.1 概述
8.2 词袋模型
8.3 实践:建立字典以计算图像间相似性
8.4 课程小结
报名
现在可领取 100元优惠券 ,12月6日-12月30日每周三、周六晚 19点到 21 点授课。
请添加工作人员「深蓝学院」助教报名





