




扫码进入专题
智能科学技术著作丛书
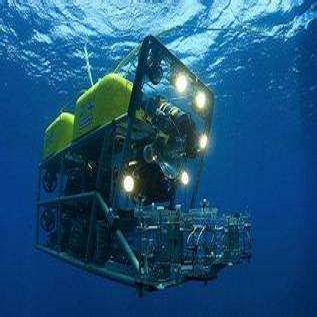
人工智能、机电、计算机、自动化、传感器等技术的迅速发展,使人类发明、研制先进的海洋高科技装备成为可能。水下机器人作为人类探索、开发水下世界的有力工具,正在水下工程、大洋科学考察等领域发挥着不可替代的作用。
▲ 中国“潜龙一号”水下机器人
水下机器人一词源于机器人学。狭义上讲,水下机器人是一种利用水下动力推进技术在水下运动,具有视觉和感知系统,能够基于声呐、水下摄像机、机械臂等任务载荷,通过遥控操纵或者自主方式辅助甚至代替人类去完成水下勘察、搜索、跟踪等任务的潜水装置。在自动化领域,水下机器人被看成是机器人的一类,是机器人相关技术在水下的特殊应用,属于特种机器人范畴。在海洋工程领域,也可将水下机器人称为无人水下航行器(unmanned underwater vehicle,UUV)、无人水下运载器、无人潜水器、无人潜航器或者无人潜器等。
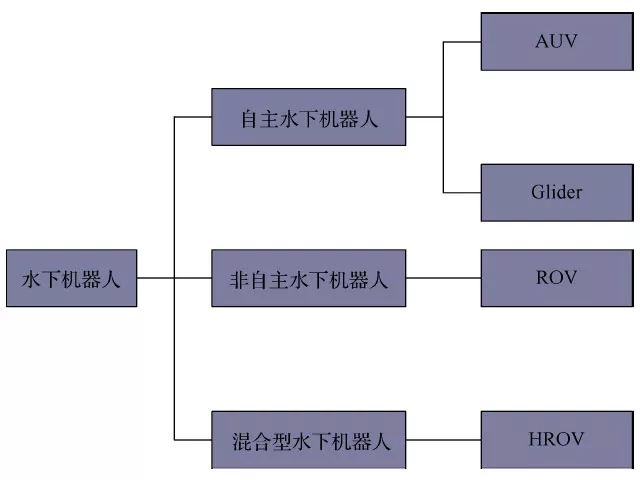
▲ 水下机器人分类
从自主性角度将水下机器人分为自主水下机器人、非自主水下机器人和混合型水下机器人三类。自主水下机器人包括在水下采用走航模式航行的自主式水下航行器(autonomous underwater vehicle,AUV)和在水下采用滑翔模式航行的水下滑翔机(Glider)。非自主水下机器人是无人有缆的遥控式水下机器人(remote operated vehicle,ROV)。混合型水下机器人在深海与深渊探测领域产生,即一种兼具自主和非自主两种模式的混合型遥控式水下机器人(hybrid remotely operated vehicle,HROV)。
水下机器人的潜航定位是水下机器人可靠、准确地执行水下任务的信息保障和技术前提,是研究开发水下机器人的难点和热点问题之一,也是人工智能和智能控制领域的国际前沿研究课题。由于水体的法拉第笼效应,水下机器人通常无法借助无线电导航系统实现水下远距离、大范围的准确定位,只能通过其他传感器感知自身状态和环境信息,因此水下机器人的导航系统更强调自持性和完备性。受艇体体积和搭载能力限制,水下机器人导航系统往往选用小体积、低功耗的惯性单元,这导致水下机器人导航系统通常存在定位精度低、定位误差累积迅速等问题,需要尽可能地借助水声设备为水下机器人导航系统提供误差标校或辅助导航信息。由于水声设备的丰富性和多样性,往往需要根据作业环境、任务需求和传感器类型灵活配置水下机器人的导航方式、系统结构及核心算法,因此针对水下机器人导航系统的研究尚有许多关键理论和技术问题亟待解决和完善。
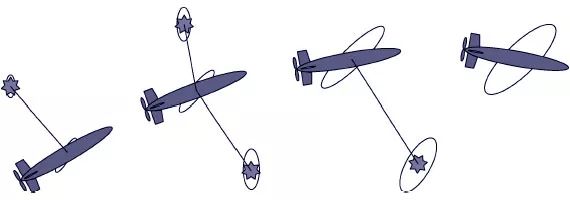
▲ 航位推算和环境特征制图位置的不确定性
同步定位与制图(SLAM)算法被认为是移动机器人生成真正全自主能力的核心问题之一。对AUV 而言,由航位推算引入的噪声,或者模型不确定性,都将导致AUV 的推位导航系统的定位误差随时间逐渐积累。又由于环境感知传感器固定在AUV 上,当环境信息融入地图中时,AUV 的定位误差也一并被引入,导致AUV 如图所示的航位推算和环境特征制图位置的不确定性(由椭圆表示)越来越大。
《水下机器人导航技术》主要研究水下机器人导航定位和多水下机器人协同定位,重点介绍水下机器人导航定位相关技术的研究进展。本书共6 章。
▶ 第1 章介绍水下机器人的种类、定义以及常用的导航系统和应用实例,并对水下机器人导航系统几种典型技术的发展现状进行综述;
▶ 第2 章首先对航姿参考系统(attitude and heading referencesystem,AHRS)中微惯性测量单元(micro inertial measurement unit,MIMU)进行标定,应用递推Allan 方差算法辨识微机电系统(micro electro mechanical system,MEMS)惯性器件的各种误差分量,应用时间序列分析法构建水声多普勒测速仪(Doppler velocity log,DVL)中噪声信号模型,基于S 面控制理论设计自适应Kalman 滤波器用于DVL 信号滤波;
▶ 第3 章提出具有磁偏角估计与修正能力的小型自主式水下航行器(autonomous underwater vehicle,AUV)组合导航系统的数据融合架构,基于微型航姿参考系统工作原理,提出磁偏角辨识算法,最后提出一种具有磁偏角自适应补偿能力的小型AUV 组合导航系统数据融合算法;
▶ 第4 章基于强跟踪均方根无损Kalman 滤波(unscented Kalman filter,UKF)算法,提出基于纯距离观测信息的惯导系统误差修正算法,不但能够准确跟踪惯导系统的位置误差,而且能够对惯导系统的速度误差进行辨识,从而实现对惯导系统位置误差和速度误差的全面补偿;
▶ 第5 章基于Sage-Husa 自适应UKF 算法,提出一种水下机器人在结构化港口环境中的同步定位与建图算法;
▶ 第6 章针对单领航者相对距离测量的多AUV 协同导航定位算法展开研究,建立基于定位误差的单领航者协同导航定位系统的数学模型,并基于鲁棒UKF 算法实现单领航者协同导航系统的数据融合策略。
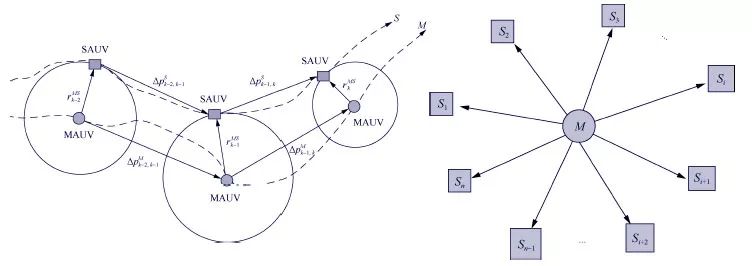
▲ 基于单领航者相对位置测量的多AUV 协同导航网络
多领航者协同导航定位虽然能够有效地提高低精度水下航行器的导航定位精度,但是其要求至少有两个主领航者。而基于单领航者相对距离测量的多AUV协同导航方法就是一种主从式多AUV 协同导航方法。
本书的相关研究得到了国家重点研发计划(2018YFC0309403)和国家自然科学基金(51309066,61603110)的资助。本书主要从水下机器人的实际应用中总结水下导航系统原理、技术特点及研究进展,书中涵盖不同水声信息辅助的水下导航系统原理及信息融合方法,着重阐述水下机器人导航的模型构建和算法实现,使读者可以尽快了解、掌握不同应用背景下水下机器人导航系统的理论推导、方案设计和技术实现。
本文摘编自《水下机器人导航技术》(张强,张雯著. 北京:科学出版社,2019.6)一书“前言”“第1章 绪论”,有删减,标题为编者所加。
(智能科学技术著作丛书)
ISBN 978-7-03-061260-1
责任编辑:张海娜 赵微微
本书面向海洋工程领域的技术研发需求,简要总结了水下机器人及其常用水下导航相关技术的国内外研究现状,重点研究了水下机器人导航系统典型技术,包括:水下机器人导航传感器数据处理方法、水下机器人推位导航技术、大潜深AUV 惯导系统纯距离误差修正算法、AUV 水下同步定位与制图算法、基于单领航者相对距离测量的多AUV 协同导航定位算法等,突出了理论性和实用性。
由中国人工智能学会(CAAI)与科学出版社合作编辑出版的《智能科学技术著作丛书》, 适时总结、传播我国学者在“智能科学技术”领域的研究开发及应用成果,优先出版有助于将科学技术转化为生产力以及对社会和国民经济建设有重大作用和应用前景的著作,以期为繁荣我国智能科学技术事业、增强自主创新能力、建设创新型国家做出贡献。
了解“智能科学技术著作丛书”出版事宜
识别二维码联系编辑 张海娜
扫码进入专题
智能科学技术著作丛书
(本文编辑:刘四旦)
一起阅读科学!
科学出版社│微信ID:sciencepress-cspm
专业品质 学术价值
原创好读 科学品味
传播科学,欢迎分享“在看”▼