
机器视觉技术概述
机器视觉技术的农业应用研究进展
机器视觉技术是运用光学设备获取真实图像,通过图像处理技术进行图像分析获取所需信息或控制机械执行装置完成预设操作的一种非接触式测量技术,可以对目标物体的外形特征、位移尺寸等几何量进行实时、在线检测,具有准确可靠、高精度、高效率等优点,广泛应用于工业、农业、制造业、交通业、航空航天等领域。
机器视觉技术在农业领域的应用研究起始于20世纪70年代,主要集中在植物种类的鉴别、农产品品质检测等方面,初期的研究多数是对机器视觉在农业应用的可行性分析及图像处理算法的开发。随着计算机软硬件、图像采集处理装置、图像处理技术的迅猛发展,机器视觉技术在农业的应用领域不断扩展。目前,美国、日本、德国等发达国家已经开始将机器视觉系统应用到农业生产的各个阶段,以解决人口老龄化加剧、劳动力缺失等问题引起的挑战。
中国的相关研究,多数仍处于试验阶段,但随着国家的政策支持和经济投入,也取得一定研究成果;机器视觉技术在农业领域主要应用于农产品质量分级和无损检测、作物信息监测等。基于机器视觉的农业装备可以极大提高生产效率,实现农业生产的智能化。随着智能驾驶的兴起,农田车辆导航成为当前研究热点,搭载机器视觉系统的智能农业机械也广泛地应用在农业生产中。中国正处于传统农业向现代农业的过渡期,融合各种现代化智能技术的农业将成为未来发展趋势。机器视觉技术在农业生产的应用可以节约劳动力、带动产业升级、推动农业现代化的发展进程,对未来农业的智能化发展有重要意义。
机器视觉系统一般包括光源系统、图像捕捉系统、图像数字化模块、图像处理系统和控制执行模块(图1)。首先采用CCD(CMOS)摄像机获取图像,经采样量化后将模拟图像转换为数字影像或数字信号传送到图像处理系统。图像处理系统对这些信号运用各种运算进行目标特征的提取,如目标的颜色、位置、大小等,最后根据预设的判定标准输出所需结果、显示数据或控制执行模块完成预定操作。
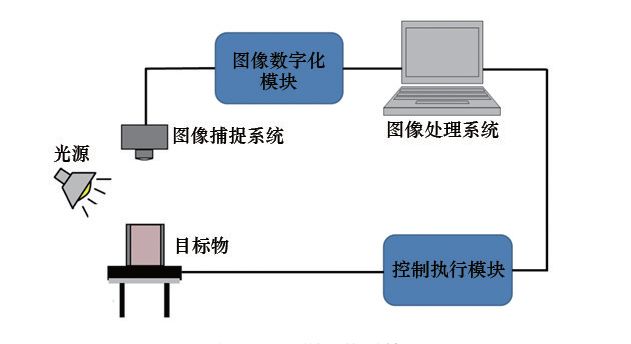
图1 机器视觉系统
现在机器视觉技术已经发展成为一门涉及人工智能、神经生物学、心理物理学、计算机科学、图像处理、模式识别等诸多领域的交叉学科。随着基于统计学模型的机器学习的快速发展,各种浅层机器学习模型相继被提出。结合机器学习相关统计学特征的算法使得机器视觉系统的精度和效率都有了很大提升。近年来,深度学习在特征提取方面表现出来的独特优势,成为人工智能领域最热门的学习方法。其中,卷积神经网络模型(CNN)是专门用于视觉领域的学习方法,极大地推动了机器视觉技术的发展。
机器视觉在农业生产中的应用
目前,机器视觉技术在农业生产中的应用研究范围很广,涉及农业生产的各个环节:在农业生产前期,可以利用机器视觉进行农作物种子的精选和质量检验;在农业生产环节,机器视觉可以被用来进行作物病虫害的监视、植物生长信息的监测、果蔬的检测等;在农业生产后期的应用包括水果分级、粮食无损检测等。机器视觉也被广泛应用在农业机械上,可以提高生产效率、节约劳动力、提高农业自动化水平。
农作物的无损检测
1)种子质量鉴定
农作物种子的质量是决定农作物的最终产量的重要因素,因此类型识别以及播种前的精选,对于提高农作物产量具有重要意义。传统的人工分选与检测耗时耗力,工作量大。20世纪70年代,国外就已有研究者利用机器视觉技术对获取的种子图像进行基本的几何测量,获得形状、长宽比、面积等参数,进而区分种子的类别。20世纪80年代后,很多研究者基于获取的彩色图像对种子进行品种鉴定和质量分级。近年,许多研究者提出一些创新性算法或者将原有算法结合,对于原始获取的种子图像进行分割和提取。陈兵旗等提出了一种基于图像处理的棉种精选算法。使用首帧差分阈值分割的方式提取种子区域的二值图像,然后在原图像的种子区域计算红色像素数并判断红色种子,通过分析二值图像判断破壳种子,最后对种子图像进行微分处理并去除边缘像素判断裂纹种子。Hong等利用图像处理技术结合K最近邻(KNN)、支持向量机(SVM)、随机森林(RF)等分类技术识别混合样本中的水稻种子。比较各种分类器的性能,采用随机森林方法对6种不同水稻品种的图像进行采集和分析,其分类系统的平均精度可以达到90.54%。该研究为评估水稻种子的纯度提供了参考。李振等设计了一种蔬菜种子活力指数视觉检测系统。首先对图像进行预处理,然后将每一个生长周期所得图像与原始未发芽图像进行像素对比,通过视觉检测系统计算得到发芽指数,进而得到种子的活力指数。将系统测得结果与人工测量结果进行比较,准确率高达92%以上。王侨等提出了玉米种粒图像动态检测方法,根据种粒图像RGB颜色特征,提取出种粒区域及其各颜色区域,结合种粒形态特征建立了周长、面积等20个检测指标,并通过测试统计确定了其合格范围,最终据此分析和完成了尖端露黑色胚部、小型、圆形、虫蚀破损、霉变等不符合定向播种种粒的判断。从试验数据来看,这些算法具有比较高的识别率和适用性,可为种子质量检测分选系统提供一定参考价值。
利用机器视觉技术进行种子质量检验的步骤一般包括:图像采集、特征提取和分类器设计。一些研究者在此基础上开发了机械分选装置,并且建立了种子在线检测系统。陈兵旗等设计了一种基于机器视觉的水稻种子精选装置。装置主要包括传送带、光电触发图像采集系统和图像处理与分析系统,可以检测出几何参数不合格及霉变的种子。在种子精选过程中,以扫描线上的像素突变次数来判断种子的破裂,利用不同的阈值提取稻种的面积差,判断稻种是否霉变或者破损。检测结果如图2所示,其中绿色椭圆表示检测出的霉变种子,该处理系统可以有效识别不合格种粒。
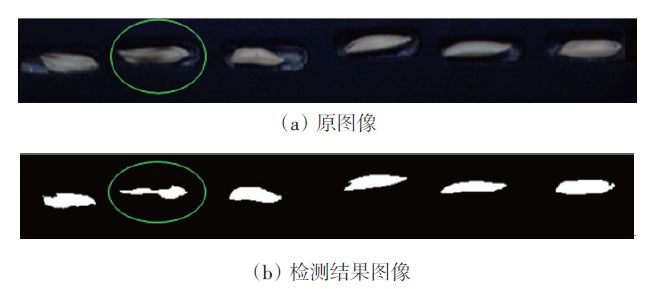
图2 霉变种子
20世纪90年代起,人工神经网络(artificialneural network,ANN)开始应用于农作物分类。随着在全世界范围内掀起的人工神经网络的研究和应用热潮,新的人工神经网络模型的不断推出,人工神经网络对种子精选与检测的精度和效率有了很大提升。Arefi等结合机器视觉和人工神经网络对4个小麦品种进行鉴定。利用种粒的形态特征和颜色特征。在ANN的训练阶段使用了280幅图像的11个特征,利用40幅图像进行验证,并且使用80幅图像进行ANN的测试。系统整体分类成功率为95.86%。李景彬等提出了一种基于BP神经网络的非线性识别方法,对3个脱绒棉种进行识别检测,其综合测试准确率为90%,证明该方法是可行的,有效地提高了脱绒棉种的识别准确率,该研究可为其他粒状种子品种识别提供了参考。
2)农产品分级检测及性状测量
机器视觉技术具有准确、客观、无损等优点,在农产品的品质检测和分级方面有很多研究和应用。通过提取农产品静态图像中的形态、颜色等基本特征信息,确定农产品的品质,最后依据分级标准进行分级操作。饶秀勤设计了水果品质检测与实时分级系统。利用HSI 颜色模型、主成分分析法、阈值分割等方法对水果尺寸、形状、颜色和表面缺陷等品质指标进行提取,进行水果的实时检测和分级。周竹等根据马铃薯的外形特征,设计了基于机器视觉的马铃薯分级系统,对马铃薯按照大、中、小进行分级。同时,以马铃薯缺陷面积大小为判别依据,实现了马铃薯缺陷的在线监测。Hasankhani等基于马铃薯的尺寸和颜色设计了马铃薯快速分级系统。首先对样本进行预分级,然后通过分级系统进行健康评估和分级,对比两项数据得到总体分级准确率为96.823%。Sofu等设计了一种苹果实时自动分检和质量检测系统。通过对苹果的4个不同角度图像进行处理,然后根据苹果的颜色、大小、重量和缺陷程度作为分类指标对苹果进行分类,平均每秒可以对15个苹果进行检测。
对农作物种子的形态、色泽、纹理等性状进行特征信息的提取与分析,称为考种。由于考种工作量大而繁琐、主观性较强、测量效率低,一些研究者对不同种类的种子特性进行分析,开发了基于机器视觉技术的考种系统。其中,玉米考种系统是目前工作中常用的仪器。它可以快速准确地提取玉米种子外形轮廓,进而对果穗长度、穗行数、每行粒数、种穗饱满度等形态特征进行提取。中国也有很多果穗性状无损测量相关的研究。王侨等设计了一种玉米种穗精选传输装置,可以实现玉米种穗性状动态测量。根据种穗图像中种穗的外形特征、黄色籽粒区域与整个种穗的面积比、端面矩形度等参数判断合格种穗,可以提高大批量种穗分选的效率。刘长青等提出了一种基于机器视觉的玉米果穗参数图像测量方法。使用摄像头连续图像,经过图像处理,获得玉米果穗的穗长和穗宽、每一穗行的穗粒数和穗行宽度、穗行数,其检测装置如图3 所示。试验表明,使用该方法的参数测量准确率较高、处理时间短。该成果可应用于玉米千粒质量检测、产量预测育种和品质分析等场合,获得了发明专利。毕昆等基于机器视觉技术,研制出一种玉米果穗性状参数自动检测装置。增加了玉米果穗性状检测装置的可测量参数,测量效率和精度较高。利用机器视觉提取玉米粒行并统计籽粒数,该方法效率较高,并且成本低。周金辉等结合果穗颜色特征及果穗的生物学规律,建立玉米果穗的性状计算模型,精确计算玉米性状参数。穗行数及行粒数的零误差率在93%以上。
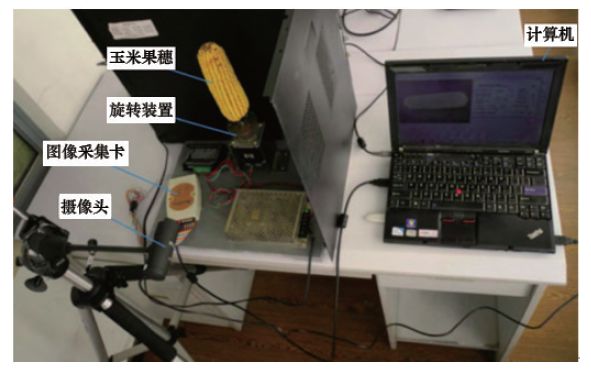
图3 玉米果穗参数图像测量装置
3)精密播种及播种机械质量检测
精密播种就是利用播种机控制播种时的粒距、行距和深度,可以提高粮食产量,有效利用耕地。其中,排种器的性能是影响播种机播种精度的重要因素,因此排种器的性能检测技术成为很多学者关注的热点。Karayel利用高速摄像机测量了排种器排种间距和播种速度。马旭等对获取的种子动态图像进行处理,利用图像中的种子面积和种子间距检测精密排种器性能。Yazgi等利用棉花种子运动图像,研究了排种器的种子间距均匀性性能。赵郑斌等运用机器视觉技术对穴盘精密播种机进行播种性能检测,系统的重播率、漏播率检测精度较高。秦忠连基于机器视觉技术,实现了排种器性能检测中的种子粒数、行距、穴距等基本参数的自动测量。研究采用了光电触发方式采集序列图像,利用图像合成算法对连续帧图像进行拼接;采用大津法自动获取阈值,对拼接图像进行阈值分割;提出了基于种子面积的噪声识别、种子重叠识别和种子数量统计方法。采用纵向和横向投影的方法,获得种子在横向和纵向的分布情况,从而对于条播能够获得各统计区间上的种子粒数、断条率等参数;对于穴播和精播能够获得重播率、合格率、漏播率等参数,以此检测排种器的性能。
定向播种是在精密播种技术要求基础上,利用作物生长的规律性,控制种粒的播种方向。可以使作物叶片有规律生长,增强田间通风效果,实现合理密植。定向播种首先要对种粒的特征进行提取。宁纪锋等利用图像中玉米尖端特征,开发相应算法进行玉米籽粒的尖端和胚部的识别。刘长青等研究了玉米种粒动态检测算法,并设计了玉米的精选和定向定位装置。通过计算玉米种子黄色区域形心点与白色区域轮廓点的距离,可以确定种粒尖端朝向。通过分析种粒区域中白色区域的大小,进行玉米种粒胚芽朝向的判断,为种粒定向包装和定向播种提供了依据。王侨等基于机器视觉技术,针对适于定向播种的合格玉米种粒,设计了一种定向定位摆放装置。相机采集图像传到系统后,判断尖端朝向信息,控制调向分面摆放装置精确旋转调整种粒的朝向,能够实现可控式的、多方位的定向。根据检测到的胚芽正反面的不同,能够将定向种粒准确地定位分放在指定的摆放工位上,经实际测试,定位和检测准确率较高,可以为定向播种的种粒定位提供参考。
农作物信息采集与病害检测
1)农作物病虫害检测
农作物在生长过程中极易遭受病虫侵害,从而影响最终产量。传统的大面积施药不仅浪费资源,更容易对环境造成污染和破坏。因此,对作物病虫害区域进行检测和识别,控制喷药机械精准喷洒,是当前机器视觉在农业应用研究的热点。陈兵旗等研究了小麦病害图像诊断算法。首先利用小波变换结合病害纹理特征分析进行病害部位的强调,然后通过模态法自动阈值分割,获得二值图像,并对其执行膨胀与腐蚀处理,获得病害部位较完整的修复图像。最后将修复图像病害部位的二值图像与原图像进行匹配,获得结果图像原图像及检测结果图像(图4)。获得检测图像之后,将病害部位特征数据与小麦病害种类数据库比对,进行病害类型的判断。韩瑞珍等设计了害虫远程自动识别系统,实现了大田害虫的快速实时识别。害虫图像经过分割后,寻找最大连通区域进行去噪处理得到最后的害虫图像,提取个特征值并保存特征值矩阵。利用得到的特征值矩阵对支持向量机分类器进行训练。最后,利用分类器对害虫识别请求进行自动分类。该系统可以通过3G无线网络将害虫照片传输到主控平台实现远程自动识别。张芳开发了一种病斑图像的分割算法,算法采用了基于HSI颜色模型实现农作物叶部病斑图像的分割,利用颜色信息实现病斑和叶片的分离,根据亮度信息消除图像中背景信息的干扰。
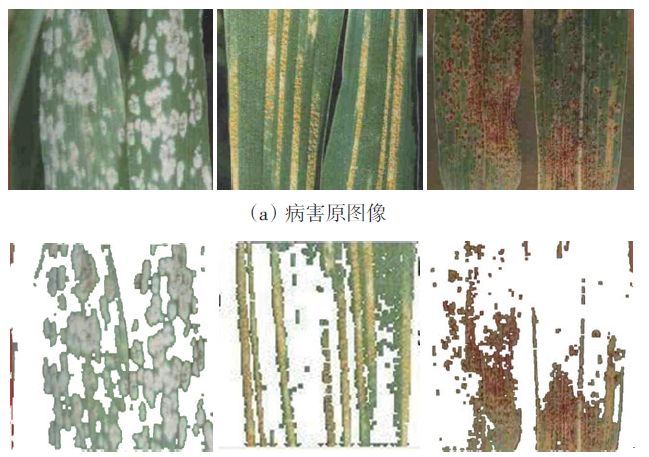
图4 小麦病害检测结果
2)作物生长信息监测
作物外部生长信息包括植物的叶面积、株高、叶片颜色等,通过对作物生长信息的监测,可以及时调整作物培养方案,为作物提供适宜生长环境,满足精细化农业生产管理的要求。机器视觉技术对作物的生长检测主要是采集作物二维图像或合成的三维图像,进行定量分析,判断作物生长状况。马稚昱等采用机器视觉及图像处理技术对多株菊花生长信息进行了监测研究。实验过程中,采用了一种基于亚像素和区域匹配的误差消除估计算法,有效地提高了检测精度。检测系统采用CCD 相机对旋转云台上的植株进行定时取像,对菊花的茎长生长进行了分析,实现无接触的植物生长监测。作物的二维图像视觉监测系统虽然具有出色的处理性能,但由于植物多数具有复杂的冠层形状,很难从重叠的植物冠层分离单个植株,并且叶片及植株具有不同的颜色和纹理,所以会产生大量的计算数据。陈兵旗等以大田间的玉米植株为研究对象,利用双目立体视觉技术对其进行动态监测与三维建模,监测装置如图5所示。首先获取左右视觉图像,利用大津法对测量区域内的作物进行二值化提取。通过对测量区域进行网格分割,推算作物覆盖面积。利用左右视觉图像视差进行三维重建,获得白色目标像素的形心点云的三维坐标和平均株高。最后利用OpenGL实现了玉米生长过程的三维可视化显示,图6分别表示了3个不同生长时期的玉米三维建模结果,三维测量的株高设定为模型主茎的高度,叶片数、叶片参数、主茎直径等参数根据其生长规律自动生成。该研究对玉米的叶片和主茎进行建模,能够直观地观察作物的生长和发育过程。该研究方法同样可以应用于作物的产量预测,通过对玉米穗等其他植株器官进行建模,模拟玉米抽穗之后的生长过程,从而获取玉米果穗生长信息,进行玉米的产量预测。Jin等开发了实时立体视觉系统对玉米植株进行检测,获得玉米植物冠层的视图。通过实时图像处理算法,有效地分离出单个玉米植株并检测了它们的中心位置。在多个生长阶段的玉米植物上测试了立体视觉系统。结果表明系统在室外照明条件下处理缠绕的植物冠层方面表现出优异的性能。

图5 三维图像监测设备
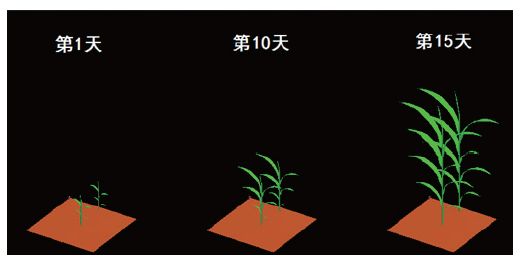
图6 三维建模结果
3)果蔬的检测及采摘
果蔬的采摘工作耗时耗力且人工成本较高,由于机器视觉可以完成形状和颜色识别相关工作,因此结合机器视觉的自动采摘设备具有很广阔的发展前景。Liu等研究了自然环境下桃子果实的自动识别算法。以色差R-G的平均值作为阈值提取桃子红色区域,然后进行匹配扩展以识别整个区域。通过轮廓上线的垂直平分线的交点,得到拟合圆的潜在中心点。最后,通过计算潜在中心点的统计参数,得到拟合圆的中心点和半径。算法的环境适应性较高,可以识别单个果实、彼此接触的果实、被遮挡的果实,且识别准确率高。图7为采集的果树上桃子彩色原图像(图上圆圈为最终拟合结果),(a)为顺光拍摄,光照强,果实单个生长,有树叶遮挡,背景主要为树叶;(b)为弱光照、相机自动补光拍摄,果实相互接触,无遮挡,背景主要为树叶;(c)为逆光拍摄,图像中既有单个果实又存在果实相互接触,且果实被树叶部分遮挡,背景主要为枝叶和直射阳光。由检测结果可知,该算法具有很好的拟合效果。Silwal等在机器视觉系统中,使用迭代圆形Hough变换(CHT)检测清晰可见的苹果。对图像中相同像素的连通域进行分析,检测部分遮挡的苹果,通过颜色分析鉴定潜在的果实。最后通过试验证明了连通域分析和CHT的融合算法可以显著提高检测精度。赵晓霞等研究了桃子图像的图像分割方法。利用RGB 模型和HSI模型分别对彩色图像进行了3种方法的灰度化处理。然后采用最大类间方差法对图像进行二值化处理,结合去噪和匹配膨胀的算法可以对自然环境下的桃子果实图像进行有效的分割。司永胜等提出了利用归一化的红绿色差分割苹果的方法,随后采用随机圆环法对苹果轮廓图像进行果实圆心和半径的提取。彭辉等采用双目立体视觉系统解决了重叠果实的分割问题,提出了基于视差图像的果实分割算法,可以有效地分割相互遮挡的果实,具有较强的鲁棒性。Linker等提出了一种在自然光照条件下苹果彩色图像计数的算法,可以有效估计果园产量,进行果园管理决策。
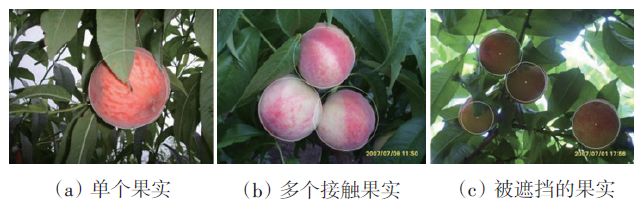
图7 彩色原图像上的拟合结果
农田视觉导航
1)导航路线检测
农业车辆自动导航是当前和未来农业智能化研究的热点,基于机器视觉的导航路线检测算法是自动导航系统的核心。早在20世纪70年代就有研究者提出视觉导航的概念,在20世纪90年代,很多国家开始对农田视觉导航技术进行研究,提出了杂草检测、导航路线检测的方法。中国随后也开始进行相关的研究。对于农田导航路线检测,车辆或机器人工作环境主要分为水田和旱田,水田中的导航路线检测的重点是苗列线检测,陈兵旗对插秧机器人视觉系统进行了研究,提出了基于图像处理和Hough变换的目标苗列线检测,土田埂及水泥田埂的检测。随后,又研究了水田自动管理机器的行驶路线检测算法。首先以图像中的颜色分布来判断稻谷之间的空间作为行进路线,然后通过对水平线轮廓线的分析,检测出其运动方向的候选点,最后通过已知的点Hough变换检测移动方向线。其检测结果如图8所示,图中红线表示检测出的水田的导航路线,视觉系统根据红色导航线控制机器的行进方向,可以稳定行驶。该算法检测速度快、适应性强,对于复杂水田也可以有效提取导航路线。毛可骏等研究了基于机器视觉的自主插秧机导航信息的提取,提出了一种利用秧苗行分割线作为基准线提取导航参数的算法。Han等提出了基于图像分割的车辆导航算法,首先将彩色图像转换成灰度图像,然后计算出每个像素的标准偏差,将平均值和偏差值进行融合,作为支持向量机分割图像的新输入因子。最后对小波分析得到的低分辨率图像进行了处理,分割的结果克服了杂草等高频干扰的影响。张方明等研究了水田作业轮式自动农业机器人的路径规划方法,设计了矩形田块和梯形田块的自动插秧机路径规划方法。
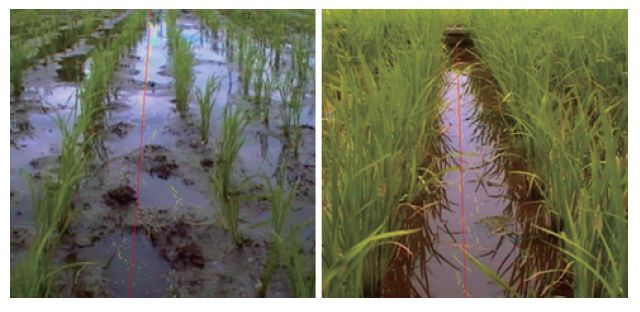
图8 水田导航路线检测
旱田中的导航路线一般是地垄或者已作业区域和未作业区域的分界线。赵颖等研究了基于机器视觉的耕作机器人行走目标直线检测,提出了犁沟线斜率的检测算法和基于扫描线的图像分割方法,首先用安装在拖拉机前方的摄像机采集图像,然后根据已耕作区域、未耕作区域和非农田区域的特征,分析田端和犁沟线位置和方向候补点群,最后使用基于一点的改进Hough变换算法计算犁沟线的斜率。旱田导航路线检测结果如图9所示,其中,红色十字表示检测出的已知点,黄色直线表示旱田的导航路线,由检测结果可以看出,该算法在静态图像(a)和动态图像(b)中都可以准确地检测出导航线。李景彬等研究了采棉机和棉花铺膜播种机田间作业导航路线和田端的图像检测方法,提出了检测采棉机田间作业路径算法,首先针对不同区域的目标特征进行提取,然后利用小波变换、线性分析和前后帧相关联等方法,确定直线变换候补点群,最后用过已知点的Hough变换对候选点进行线性拟合。
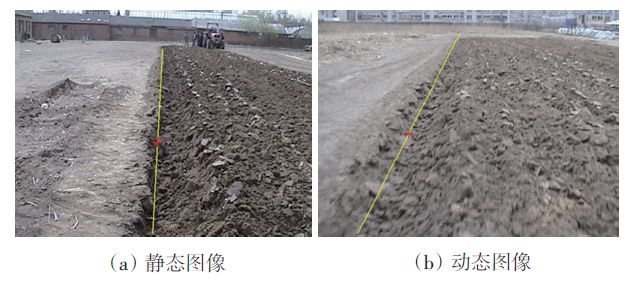
图9 旱田导航路线检测
2)农田障碍物检测
在农用车辆自动驾驶的研究中,农田障碍物的检测也是很重要的研究内容。机器视觉系统检测到障碍物后控制执行机构进行制动或者警告,对于实现无人驾驶或者车辆辅助驾驶都具有非常重要的意义。张磊等提出了一种基于双目视觉的农田障碍物检测方法。首先,利用基于扫描线的目标提取方法进行目标提取,然后进行立体视觉匹配计算解出障碍物型心空间坐标,进而确定障碍物的位置。苟琴等研究了基于视差图的未知环境下农田障碍物检测方法,首先用摄像头采集左右场景图并计算其视差图,然后通过视察阈值获得潜在障碍物,最终通过面积阈值和高度阈值对障碍物定位。李权利用双目视觉结合最大类间方差法提取障碍物,采用SURF(speeded uprobust features)算法检测特征点,并进行深度信息计算。Cherubini等提出了一个基于传感器的视觉导航框架,可以保证避障和导航同时完成,即使存在视觉遮挡,机器人也可以避免碰撞。这些研究均具有一定可行性,为实现农用车辆无人驾驶提供了参考依据。
3)农田视觉导航系统集成
与公路导航相比,农田导航目标的识别更复杂,但是农田导航不需要特别关注周围环境,所以农用视觉导航系统更容易推广使用。国内外很多研究者将视觉导航系统和控制系统、机械装置结合,设计了自动驾驶系统。自动驾驶的农用车辆装配农田作业机械进行农药的喷洒、农作物收获等大规模作业,可以大幅度提高效率、节约劳动力。Hanawa等开发了农用拖拉机的立体视觉导航系统,对两个相机采集的图像进行处理,可以检测农作物行、人为标记、非耕作区域。将检测到的作物位置数据传送到拖拉机转向控制器,可以完成拖拉机的自动耕作。English等对农田的平行和侧向偏移结构,比如作物行或者犁沟线,结合颜色、间距、结构性进行分析,利用C++和OpenCV实现从拍摄的俯视图中提取导航线。采用多用途车搭载视觉导航系统和GPS系统,完成了自动导航。陈兵旗等研究了农用拖拉机田间视觉导航系统。利用结合传感器与机器视觉技术进行信号的采集与处理,通过机械装置控制方向盘转动,可以实现拖拉机的无人驾驶。原型样机如图10所示,(a)为机器视觉导航系统组成,包括摄像头、计算机处理系统、转向控制系统等;(b)为转向控制系统,通过对方向盘的转向控制,实现模拟人工驾驶。通过性能测试,其导航精度远高于精密GNSS(全球卫星导航系统)的定位精度。
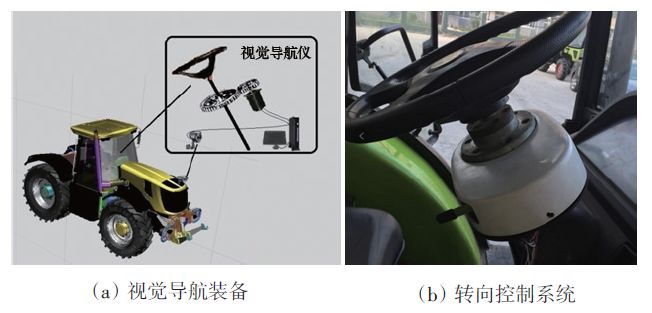
图10 视觉导航系统样机示意
存在问题及未来展望
机器视觉技术在农产品无损检测、植物生长信息检测、病虫害检测、农田视觉导航等方面的研究已有很大进步,但是由于农业研究对象的多样性和复杂性以及机器视觉技术自身的特点,机器视觉技术在农业领域的应用仍存在如下问题。
1)机器视觉技术对测量条件和环境要求较高,但是农业生产环境复杂,应用场合多变,针对不同的研究对象和生产环境需要开发不同的处理算法,使得机器视觉测量的环境适应性和可靠性较差。
2)由于农作物特征的多样化,机器视觉在农作物信息检测和特征提取方面还存在一些不足。对于一些颜色或形状特征不明显作物的检测还需要研究更高精度的检测算法。
3)目前包含末端执行机构的机器视觉系统还不成熟,未能进行大规模的农业生产应用。并且,由于机械控制系统存在的局限性,导致机器视觉在某些实时性要求较高的场合仍然达不到要求。
4)当前基于机器视觉的农业装备集成化和智能化程度不高,操作复杂。国内外很多对于农业生产的机器视觉应用研究仍处于试验阶段,农业智能装备的大规模应用还需要克服很多实际问题。
由于问题的复杂性和长期性,机器视觉系统在农业领域的应用还要经历一段很长的发展阶段,其未来的研究和发展方向主要集中在以下方面。
1)图像处理是机器视觉技术的核心,对现有的算法进行改进或者研究出更为高效的算法,提高机器视觉系统的处理效率和鲁棒性,仍然是未来机器视觉应用和发展的重要前提。当前,基于卷积神经网络的图像识别算法正处于研究阶段,训练后的卷积神经网络可以极大提高图像识别的准确性,应用卷积神经网络模型的机器视觉系统将成为未来发展趋势。
2)嵌入式视觉系统具有结构紧凑、处理速度快、成本低等特点,成为未来机器视觉系统发展的重要方向。也使得结合机器视觉系统的农机装备的大规模普及成为可能。
3)融合多种技术的机器视觉系统也是当前及未来研究热点。例如,融合机器视觉系统和北斗导航系统,可以实现农田导航系统的高精度和低成本;融合三维成像技术、神经网络技术、智能控制技术等,可以使农田作业机器人更加智能化。
结 论
机器视觉技术在农业生产中的应用研究范围很广,涉及农业生产的各个环节。在农作物种子的精选和质量检验、作物病虫害的监视、植物生长信息的监测、果蔬的检测、水果分级、粮食的无损检测及农业机械上都起着很重要的作用。机器视觉技术以其独有的优势,对实现农业的高度自动化和智能化有重要推动意义。目前,中国的机器视觉农机装备相比于国外仍有一些差距,精度及自动化水平较低,实际应用也存在可靠性问题,说明中国的农业智能化发展还有很长的一段路要走。当然,机器视觉技术本身的局限性和农业应用的复杂性也限制了机器视觉装备的大规模推广和使用。当前机器视觉技术仍处于高速发展阶段,随着现代智能化及相关技术的发展,机器视觉技术也将不断完善,现阶段的很多问题会得到解决,机器视觉技术在农业领域的应用也将进一步扩展。
基金项目:国家自然科学基金项目(31071329)
参考文献(略)

本文作者:陈兵旗,吴召恒,李红业,王进
作者简介:陈兵旗,中国农业大学工学院,教授,研究方向为图像处理。
注:本文发表于《科技导报》2018 年第11 期,敬请关注。
(责任编辑 王志敏)
《科技导报》
中国科协学术会刊
联系电话:010-62194182
欢迎投稿:lina@cast.org.cn
长按二维码 即刻关注

登录查看更多
相关内容

Arxiv
17+阅读 · 2019年9月9日
Arxiv
4+阅读 · 2019年4月9日
Arxiv
5+阅读 · 2018年9月6日
Arxiv
4+阅读 · 2017年11月27日





相关VIP内容
相关资讯
相关论文
Arxiv
17+阅读 · 2019年9月9日
Arxiv
4+阅读 · 2019年4月9日
Arxiv
5+阅读 · 2018年9月6日
Arxiv
4+阅读 · 2017年11月27日