【泡泡一分钟】自主着陆点检测:无先验知识的自主飞机的视觉着陆地点检测
每天一分钟,带你读遍机器人顶级会议文章
标题:Free LSD: Prior-Free Visual Landing Site Detection for Autonomous Planes
作者:imo Hinzmann, Thomas Stastny, Cesar Cadena, Roland Siegwart, and Igor Gilitschenski
来源:arxiv 2018
播音员:堃堃
编译:王慧国
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

大家好,今天为大家带来的文章是——自主着陆点检测:无先验知识的自主飞机的视觉着陆地点检测,该文章发表于arxiv 2018。
固定翼无人机的完全自主化需要其有在未知以及非结构地形中自动探测潜在着陆点的能力,这允许它能够将自我管理的任务完成或者处理紧急情况。
在这项工作中,通过基于环境的纹理和几何形状而不使用任何关于环境的先验知识来探测着陆地点来解决这一挑战。该方法考虑了着陆区域内的危险因素,如地形粗糙程度和坡度,遮蔽着陆路径的障碍物,以及由机载EKF估计的局部风场。后者允许在没有起落架的小型无人自治飞机上应用该方法。
安全的路径是基于无人机动力学、期望状态估计和执行器的不确定性和机载计算的高程图被计算出来的。该框架已经成功地在逼真的合成数据集和挑战性现实世界的环境中进行了测试。
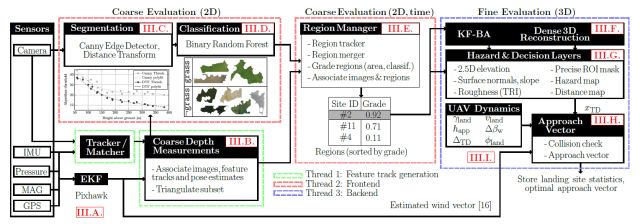
图1 无先验知识的着陆地点检测框架图。

Abstract
Full autonomy for fixed-wing unmanned aerial vehicles (UAVs) requires the capability to autonomously detect potential landing sites in unknown and unstructured terrain, allowing for self-governed mission completion or handling of emergency situations. In this work, we propose a perception system addressing this challenge by detecting landing sites based on their texture and geometric shape without using any prior knowledge about the environment. The proposed method considers hazards within the landing region such as terrain roughness and slope, surrounding obstacles that obscure the landing approach path, and the local wind field that is estimated by the on-board EKF. The latter enables applicability of the proposed method on small-scale autonomous planes without landing gear. A safe approach path is computed based on the UAV dynamics, expected state estimation and actuator uncertainty, and the on-board computed elevation map. The proposed framework has been successfully tested on photo-realistic synthetic datasets and in challenging real-world environments.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号。
点击阅读原文,即可获取本文下载链接。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




