基于 Carsim 2016 和 Simulink的无人车运动控制联合仿真(三)
简介
该节将简要说明模型预测控制的基本原理
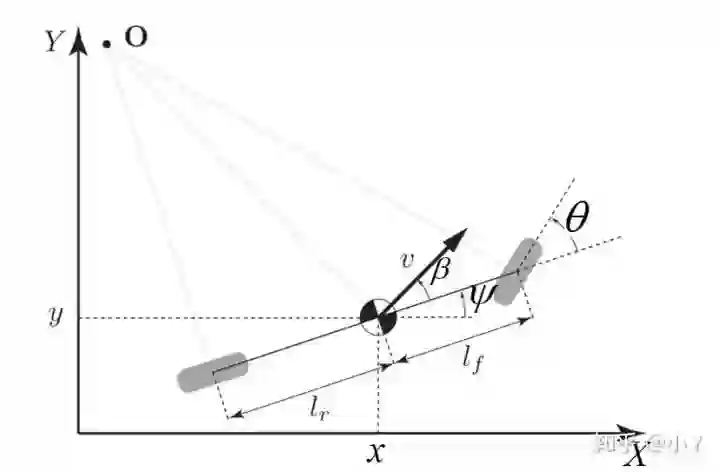
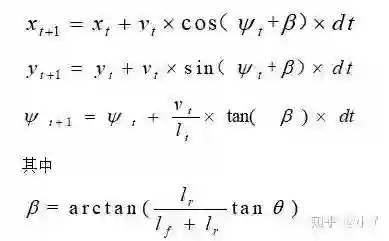
1、运动学模型
使用自行车模型作为运动学约束
2、优化问题建模
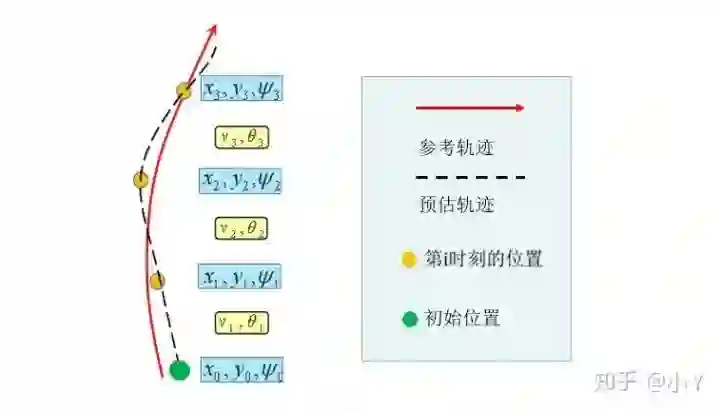
上图为模型预测控制的一个示意图,在当前位姿下,使用运动学模型对后续n个时刻的位姿进行估计,使用非线性优化器求解出cost最小的控制量v和delta
该模型假设速度恒定,即只进行横向的控制,需要进行纵向控制时,请参考优达学城上的方法
目标函数

其中:
P,Q,R 为权重矩阵
cte为无人车的横向误差
phi_errror为无人车的姿态误差
等式约束项
不等式约束项
3、单步的MATLAB程序
主程序
clc
clear all
NP = 10; %预测周期数
dt = 0.05; %预测周期
x_start = 0;
y_start = x_start + NP;
phi_start = y_start + NP;
cte_start = phi_start + NP;
ephi_start = cte_start + NP;
delta_start = ephi_start + NP;
% 状态变量和控制变量的总个数
m = 6 * NP ;
% 向量var前10个表示10个时刻x_start,第11到20个表示10个时刻y_start,第21到30个表示10个时刻phi_start,后续以此类推
var = zeros(m,1);
% 损失函数
func = @(var)cost_function( var,NP,dt );
% 约束条件
nlcon = @(var)nonlconstrict( var,NP,dt );
% 各个约束的上下界
cl = zeros( 6*NP+1,1 );
cu = zeros( 6*NP+1,1 );
% 方向盘转角的上下界(弧度)
for i = (5*NP+1):6*NP
cl(i) = -0.45;
cu(i) = 0.45;
end
% 求解的初始化
state_intial = zeros(m,1);
% 求解器的设置
opts = optiset('solver','IPOPT','display','iter','maxiter',50,'maxtime',0.5);
% Create OPTI Object
Opt = opti('fun',func,'nl',nlcon,cl,cu,'x0',state_intial,'options',opts);
% Solve the NLP problem
[A,fval,exitflag,info] = solve(Opt,state_intial)
% 向量A为所求的解目标函数
function cost = cost_function(var,NP,dt)
x_start = 0;
y_start = x_start + NP;
phi_start = y_start + NP;
cte_start = phi_start + NP;
ephi_start = cte_start + NP;
delta_start = ephi_start + NP;
cte = 0;
ephi = 0;
delta = 0;
for i = 1:1:NP
cte = cte + var( cte_start+i )^2;
ephi = ephi + var( ephi_start+i)^2;
end
for i = 1:1:NP-1
delta = delta + ( var( delta_start+i+1 ) - var( delta_start+i ) )^2;
end
cost = 1*cte + 1 * ephi + 100*delta;
end约束函数
function c = nonlconstrict( var,NP,dt )
x_start = 0;
y_start = x_start + NP;
phi_start = y_start + NP;
cte_start = phi_start + NP;
ephi_start = cte_start + NP;
delta_start = ephi_start + NP;
x_0 = 0;
y_0 = 0;
phi_0 = 0;
v = 5;
delta_0 = 0;
lf = 3;
c = zeros( 6*NP+1,1 );
for i = 1:1:NP
if i == 1
c( x_start + i ) = var(x_start + i ) - x_0 - v * cos( phi_0 ) * dt;
c( y_start + i ) = var(y_start + i ) - y_0 - v * sin( phi_0 ) * dt;
c( phi_start + i ) = var(phi_start + i ) - phi_0 - v /lf * tan( delta_0 ) * dt;
c( cte_start + i ) = var(cte_start + i ) - 3 + v * sin(phi_0) * dt;
c( ephi_start + i ) = var(ephi_start + i) - 0 + v/lf * delta_0*dt;
c( delta_start + i )= var(delta_start + i);
c( delta_start + i + NP)= var(delta_start + i) - delta_0 ;
else
c( x_start + i ) = var(x_start + i ) - var(x_start + i-1 ) - v * cos( var(phi_start + i-1) ) * dt;
c( y_start + i ) = var(y_start + i ) - var(y_start + i-1) - v * sin( var(phi_start + i-1) ) * dt;
c( phi_start + i ) = var(phi_start + i ) - var(phi_start + i-1) - v/lf * tan( var(delta_start + i-1) ) * dt;
c( cte_start + i ) = var(cte_start + i ) - 3 + v * sin( var(phi_start+i-1) ) * dt;
c( ephi_start + i ) = var(ephi_start + i) - 0 + v/lf * var(delta_start + i-1) * dt;
c( delta_start + i )= var(delta_start + i);
end
end
end参考资料
https://github.com/ksakmann/CarND-MPC-Project
https://github.com/jeremy-shannon/CarND-MPC-Project
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/

泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com
登录查看更多
相关内容

专知会员服务
32+阅读 · 2019年11月28日
Arxiv
8+阅读 · 2018年7月10日




相关VIP内容
专知会员服务
32+阅读 · 2019年11月28日
相关资讯
相关论文
Arxiv
8+阅读 · 2018年7月10日