【泡泡一分钟】RoomNet:端到端房屋布局估计
每天一分钟,带你读遍机器人顶级会议文章
标题:RoomNet: End-to-End Room Layout Estimation
作者:Chen-Yu Lee Vijay Badrinarayanan Tomasz Malisiewicz Andrew Rabinovich(Magic Leap)
来源:International Conference on Computer Vision (ICCV 2017)
编译:颜青松
审核:陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本文的主要工作是从单目RGB影像中估计房屋布局。已有的方法通常是将该任务分割成两个子任务:首先语义分割得到地板、墙面、天花板,以获取所有可能的布局;然后使用迭代优化来选择最好的布局。
与这些方法不同,本文采用了一种更直接的方法,即将布局问题当做估计一系列房屋布局关键点问题,原因是房屋布局和对应的语义分割结果能够完全确定关键点的位置。
基于以上情况,本文提出了一个端到端RoomNet来预测房屋布局关键点。本文在一些非常具有挑战性的数据集上进行了测试,例如Hedau,LSUN;结果表明本文的算法的预测结果与当前最好的算法相当,并具有200倍~600倍的加速效果。除此之外,本文的RoomNet框架还具有可扩展性能,例如在使用相同的参数容量的前提下使用递归计算和计算单元来提高关键点的精度。
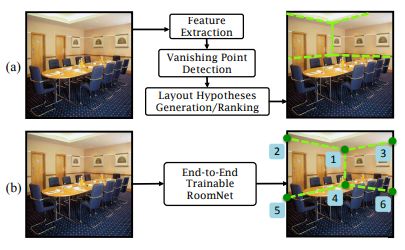
图1 (a)中是常规算法,(b)是本文的算法思路
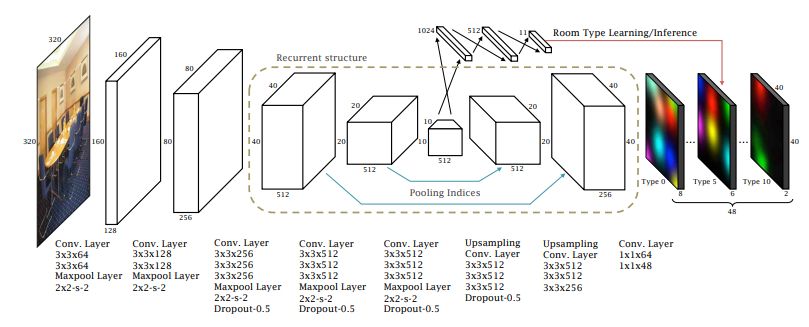
图1 本文算法的框架
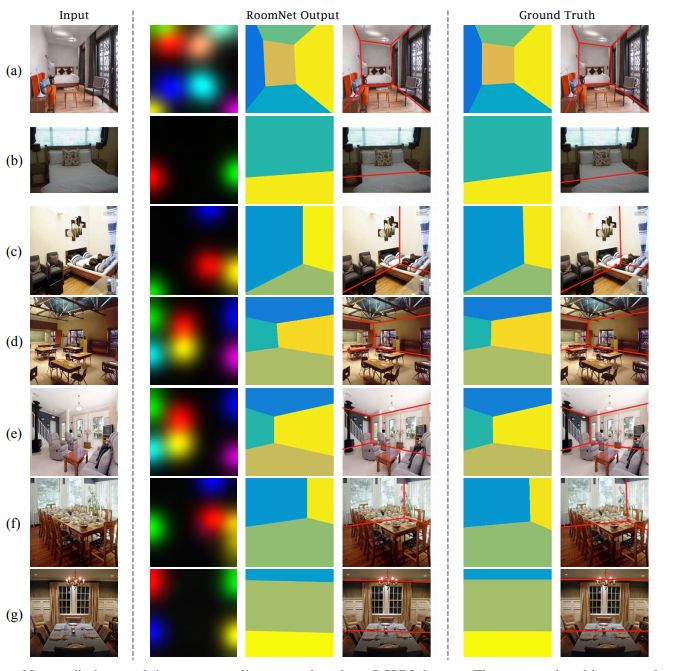
图3 本文算法的结果,其中中间一列是本文的结果,可以发现本文的算法效果质量非常好!

Abstract
This paper focuses on the task of room layout estimationfrom a monocular RGB image. Prior works break theproblem into two sub-tasks: semantic segmentation of floor,walls, ceiling to produce layout hypotheses, followed by aniterative optimization step to rank these hypotheses.
In contrast, we adopt a more direct formulation of thisproblem as one of estimating an ordered set of room layoutkeypoints. The room layout and the corresponding segmentationis completely specified given the locations of these orderedkeypoints. We predict the locations of the room layoutkeypoints using RoomNet, an end-to-end trainable encoderdecodernetwork. On the challenging benchmark datasetsHedau and LSUN, we achieve state-of-the-art performancealong with 200× to 600× speedup compared to the most recentwork. Additionally, we present optional extensions tothe RoomNet architecture such as including recurrent computationsand memory units to refine the keypoint locationsunder the same parametric capacity.
如果你对本文感兴趣,想要下载完整文章进行阅读,可以关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/forums/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com




