江苏滩涂机载LiDAR测量数据处理技术
一、引言
江苏滩涂位于江苏省东部沿海区域,地处长江、淮河下游,分布有国内首屈一指的海底沙脊群—辐射状沙洲。20世纪60年代,我国有关部门曾组织过测量,当时由于我国缺乏无线电定位设备和技术上的原因,测量成果不合格,未能使用。1979年我国再次组织江苏滩涂测量,采用近海地形测量技术,完成1:5万系列海图测量任务,从而结束了江苏东部海区无实测资料及海图空白区的历史。受当时的技术、装备、作业方法等制约,测量精度、成果质量都有一定局限性。
随着近40年的快速建设发展,江苏北部沿海地区发生了巨大变化,造成海图现势性严重落后。针对海岸地形和干出滩,江苏省测绘地理信息局多次组织航空摄影测量和机载LiDAR测量,用于海岸地形图编制和更新。2013年组织实施了大规模海岸地形航空摄影测量,编制完成一套1:10000地形图;同时应用机载LiDAR测量技术实施了滩涂测量[2]。此后,地方测绘部门每年组织航空摄影测量,主要针对海岸带陆地区域,完成海岸地形图修测。而滩涂和海部区域,由于技术难度大、工作条件差,一直未能组织全面、系统测量。针对滩涂测量,如何将常规测量技术与航空测量技术相结合,科学、高效、精确实施测绘,是迫切需要解决的技术问题。
二、江苏滩涂测量特点和需求
江苏滩涂从长江口北缘至射阳河口,以滩涂、沙洲、潮沟、养殖区、围堰、海堤等为主,滩涂坡度平缓,水下岸坡面积大,明暗沙洲多。近些年,由于泥沙淤积和经济开发,滩涂不断向外扩展、地形地貌变化很大。特别是浅滩面积宏大,最宽处约40km,涨潮时为海水淹没,落潮时沟沟坎坎。滩涂主要由淤泥组成,车辆、人员行走困难。江苏滩涂潮汐特殊,有神秘和恐怖的“怪潮”之称。受东海前进波、黄海旋转波以及苏北沿岸流的共同作用,不同流系在前进过程中达到某一谐振状态,加之此处的“巨掌”辐射沙脊地形,极可能产生局部怪潮。在很短的时间内,海水潮位急剧上涨,流速激增,来势汹涌,瞬间就能将船打翻;退潮时杳无声息,一泻千里,而且潮时很短,危及海上作业人员的安全。采用常规海岸地形测量手段工作量巨大,作业条件异常复杂、艰苦,造成江苏滩涂测量近40年未能全面复测,更新周期长,海图现势性弱。
近年来,我国相关部门重新启动了江苏滩涂测量任务。要求对江苏滩涂实施全面、系统、精细测量,完成测区大比例尺海岸地形图测绘工作。江苏滩涂测量任务包括水深测量和海岸地形测量两部分。水深测量目前只能采用常规的船载声纳测量技术,工作内容包括:单波束水深测量、临时验潮、水文调查等;高潮时作业区域为测量船能安全航行的浅海水域。而海岸地形测量,主要包括海岸线、航行方位物、干出滩等测量,可以采用地面常规测量、航空摄影测量和卫星遥感等多种方法,目前作业单位主要采用数字全站仪、GPS RTK等人工实地测量模式[3]。考虑江苏滩涂特殊的地理特征,滩涂面积大,潮汐怪异,环境危险,交通不便、工作量巨大等,完全采用常规测量手段作业难度大、效率低、人员安全无法保证,所以,作业单位提出了引入新的测量方法和技术的要求,辅助解决作业效率低、环境危险、重点区域无法作业等难题。
目前,航空、航天遥感技术发展很快,卫星遥感、航空摄影测量、无人机测绘和机载LiDAR测量等技术广泛应用于海岸地形测绘,代表了未来该领域技术发展趋势[4]。针对江苏滩涂测量,卫星遥感可以掌控测区全貌,宏观分析地形结构,测绘基础地理信息,但是无法用于干出滩大比例尺测图;航空摄影测量可以测绘大比例尺地形图,但是受测区地貌特征和立体测图技术能力的影响,干出滩的高程测量精度较低,不能满足海道测量规范要求;无人机测绘系统可以实现局部区域的精细测量,获取干出滩微地貌,但是高程测量精度依然偏低,而且不适合大区域测量作业;机载LiDAR测量可以获取干出滩高精度DEM数据,测量范围大,作业效率高,是解决江苏东部海岸干出滩测量的有效方法。
三、机载LiDAR测量技术设计
江苏滩涂测量任务及其成果,主要用于编绘海图,须具备规范性和权威性,因此,无论采用哪种技术,都应以《海道测量规范》和海洋测绘沿岸测量的技术要求为标准[5]。
1.机载LiDAR测量技术分析
⑴《海道测量规范》对大面积滩涂测量的技术要求
①重要的大面积干出滩的海岸地形测量,可采用水深测量和航空摄影测量相结合的方法进行。在高潮时进行水深测量,以求得断面点的干出深度;低潮时进行航空摄影测量,以判读干出滩上地形起伏和微地貌特征。内业处理时根据两种资料进行综合,绘制出干出滩地形图(海道测量规范7.4.2.6)。
②测绘干出滩范围、性质,干出滩上的地物、地貌,干出高度点(从深度基准面起算)等要素。
③对于大面积干出滩一般采用断面线法进行测量,断面线一般应垂直海岸线布设,断面线间距一般以图上间隔2~5cm布设,断面线上测点间距依比例尺为100m(1:2000)、200m(1:5000,1:1万)、300m(1:2.5万)、500m(1:5万)。
④干出滩范围从海岸线至水深零米线,干出滩的外缘采用水深测量资料。
⑤干出滩性质分为岩石滩、珊瑚滩、泥滩、沙滩、砾滩、泥沙混合滩、沙泥混合滩、沙砾混合滩以及芦苇滩、从草滩、红树滩。
⑥不同性质干出滩的分界线必须测绘。
⑦滩涂上明礁、干出礁均应测定其位置、高程。
⑧滩涂及其上的地物测量,平面位置中误差不大于图上1mm,高程中误差不大于0.2m,特殊区域高程中误差可以放宽0.5倍。
⑨对于靠岸的礁石应视其分布,综合测定其位置和高度。
⑩干出滩上的干出沟,应尽量测绘。
⑵机载LiDAR测量技术滩涂测量能力及作业模式
①针对大面积干出滩测量,航空摄影测量和机载LiDAR测量是《海道测量规范》规定的主要作业模式之一,而且机载LiDAR测量能获取高精度DEM数据,比航空摄影测量更有效。
②机载LiDAR集成了小型航摄相机,包含影像数据,可以测绘干出滩水陆动态变化范围,干出滩上的地物、地貌,干出高度点等要素。高程点密度达到0.25点/m2,远远高于常规断面线测量法。但是只能对露出水面的滩涂、地物进行测绘。
③机载LiDAR测量能高精度获取海岸线、瞬时水位线、明礁、干出礁、干出沟等要素信息。
④机载LiDAR测量可以提取主要干出滩性质,如岩石滩、珊瑚滩、泥滩、沙滩、砾滩以及从草滩。但对于泥沙混合滩、沙泥混合滩、芦苇滩、从草滩、红树滩等精细分类需要外业调绘。不同性质干出滩的分界线亦需要实地调绘。
⑤机载LiDAR测量平面位置中误差不大于5m(1:1万比例尺,平坦测区),高程中误差不大于0.15~0.35m,略低于《海道测量规范》要求的0.2m。
通过比较分析,机载LiDAR测量技术是海道测量规范确定的技术方法,具有规范性和权威性,可以用于大面积干出滩测绘,测量成果主要指标符合《海道测量规范》要求,其中地物属性及滩涂精细分类需要外业调绘加强和补充[6-12]。
2.机载LiDAR数据处理技术设计
⑴技术要求
干出滩测量主要内容为:高程、范围、类型以及干出滩上的地物、地貌等,测图比例尺为1:2.5万,平面定位精度:优于7.5m,高程测量精度优于0.2m,特殊区域适当放宽。
⑵机载LiDAR数据
江苏滩涂机载LiDAR数据包含两类:激光点云数据和数码影像。激光点云数据用于制作数字高程模型(DEM),进而生成等高线;数码影像用于判绘地物、地貌(除等高线)信息,生成数字正射影像图和数字线划图。江苏滩涂机载LiDAR数据满足1:1万比例尺地形图成图指标要求,点云数据平面定位精度优于5m,高程精度优于0.25m(由数据检测报告提供),基本满足海道测量规范技术要求。
⑶技术方案
以低潮线为界,分别采用机载LiDAR测量技术和船载声纳测量技术,实施干出滩DEM测量和滩涂水深测量,然后将两种测量成果拼接,实现整个滩涂地形测量目的。针对干出滩机载LiDAR测量,具体技术路线见图1。
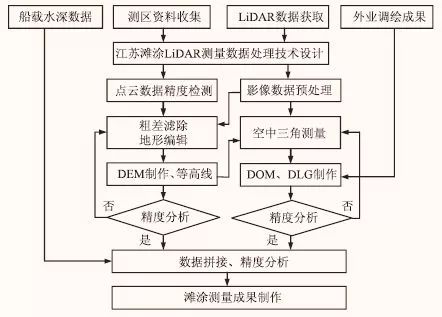
图1 江苏滩涂机载LiDAR数据处理技术流程图
①机载LiDAR测量数据获取。江苏省金威测绘公司,2013年12月~2014年6月组织实施了江苏滩涂机载LiDAR测量,获取了完整的测量数据,整个测区分为5个分区,其中2个分区分别进行了精度检测,高程中误差分别为0.130m和0.108m[2],均小于海道测量规范要求的高程测量精度优于0.2m的指标要求,奠定了江苏滩涂机载LiDAR测量技术应用的基础。
②点云数据精度检测。激光点云数据是2014年获取的,考虑到滩涂地形变化和数据时效性,加之作业单位首次应用机载LiDAR测量数据,并直接应用于年度测量任务,所以,对点云数据进行精度检测十分必要。根据滩涂测量的主要内容和机载LiDAR测量技术特点,精度检测主要针对高程测量精度。点云数据精度检测方法为:在每个航摄分区内,布设一个垂直于航线的剖面,采用常规方法测量干出滩高程检查点,同时,在其他区域均匀布设数个高程检查点,与点云数据比对分析。点云数据精度是否满足江苏滩涂测量任务要求,是该技术设计可行性的前提。
③点云数据的粗差滤除与地形编辑。点云数据的粗差剔除和分类可以自动进行,后期进行人工编辑。人工编辑需参照影像的判读和解译信息,辨别地物、地貌,去除噪声。影像数据预处理主要是基于POS数据进行影像快速拼接,形成初级影像产品,支持点云数据处理。江苏滩涂地物类型较少,但是,干出滩上水道、潮沟、水洼等分布密集、结构复杂,使点云数据的分类和编辑工作量增大。
④空中三角测量。与传统航测方法空三加密不同,LiDAR航测是以点云数据生成的数字地面模型为参考,通过POS系统直接进行全自动空三加密,数据处理过程不需要外业控制点,只需要计算公共加密点的较差,对基本定向点的精度进行分析和评价即可[6]。
⑤DEM、DOM、DLG产品制作。在对点云数据进行分类、编辑后,自动构建三角网,一般按5m间距构建数字高程模型(DEM),并自动勾绘等高线。在DEM支持下,对数字影像进行镶嵌、匀色、整饰等处理,输出正射影像产品(DOM)。在立体模式或单片上进行地物要素采集,并结合外业调绘,补充、更新地物信息,制作DLG产品[7]。
⑥数据拼接与精度分析。将水深测量数据与DEM数据进行拼接,需要格式转换、基准转换、数据抽稀、对接比对分析等。制作沿岸测量图版成果,支撑江苏滩涂地形测量任务。
3技术设计可行性
江苏滩涂机载LiDAR测量数据应用的可行性主要体现在三个方面:一是机载LiDAR测量的技术能力;二是数据源保证及其质量;三是与现行海洋测绘业务体系的对接。通过前面的分析,从权威性、规范性和测量指标等多方面论证了机载LiDAR测量技术能够达到海洋测绘应用要求。
航测数据获取占机载LiDAR测量工作量的60%~80%,是一项庞大和复杂的工作,幸运的是江苏省测绘部门2014年已经获取了完整的测区外业航测数据,经精度检测,高程中误差分别优于0.15m,奠定了江苏滩涂机载LiDAR测量技术应用的数据基础。但是由于时间过去了两年,而且应用目的和要求略有不同,所以进行精度检测分析是必要的。对精度检测工作,作业单位有坚实的基础、经验和能力。机载LiDAR数据精度是江苏滩涂测量应用的关键问题。
海洋测绘生产体系是一个专业的、规范的、完整的、业务化运行的体系,引入机载LiDAR测量数据仅仅是为了解决干出滩测量难题,其成果如何与水深测量、海岸地形测量和部分干出滩常规测量成果的对接是一个现实的问题。需要考虑数据格式、数学基础(坐标系、投影、高程基准、比例尺等)、成果形式等统一问题。机载LiDAR测量技术是地形测绘的成熟技术,生成标准测绘产品,其格式和数学基础与海洋测绘沿岸测量成果一致。海洋测绘已将标准测绘产品纳入海图编绘业务化生产体系,建立了完备的数据融合方法和标准,机载LiDAR测量成果的转化与应用不存在技术问题,只是数据处理的平台工具需要重构。
江苏滩涂机载LiDAR测量技术应用是可行的,除了干出滩以外,机载LiDAR数据还可用于海岸线、航行方位物等海岸地形测绘,提高海洋测绘技术水平。
四、结束语
由于江苏滩涂水浅、滩阔、浪大、流急、沙洲多,采用常规测量方法难度很大。特别是干出滩地带,人工实地测量条件艰苦,船载声纳测量依然困难重重,引入新的测量手段势在必行。机载LiDAR测量技术符合海道测量规范要求,技术成熟,应用广泛,逐步成为测绘领域的主要方法。针对江苏滩涂测量,通过机载LiDAR测量数据分析得出如下结论和建议。
①机载LiDAR技术测量精度高,解决了滩涂高程测量难题,满足海洋测绘应用要求,具有广阔应用前景。
②尽管机载LiDAR测量精度高,但是江苏滩涂变化急剧的特点,导致2014年获取的机载LiDAR测量数据实效降低,可能无法应用于后续开展的江苏滩涂测量任务。
③滩涂测量不要求点云数据的密度,但对滩涂上特征点、地貌和地物的测量要求较高,所以,可以通过降低点云密度,来提高测量精度和作业效率,而借助遥感影像提取微地貌信息。
④针对滩涂水陆交互的特点,海陆一体化激光测量技术更具针对性和发展前景。
参考文献:
[1]尤建红.激光三维遥感数据处理及建筑物重建[M].北京:测绘出版社,2006.1.
[2]江苏省金威遥感数据工程有限公司."江苏省沿海滩涂机载激光雷达与航空摄影成果质量自检报告"[R].2014.
[3]滕惠忠,王瑞,翟京生,等.海岸地形测量的现状与发展[C]//天津:第十七届海洋测绘综合性学术研讨会论文集,2007.
[4]张荣华,林 昀.基于机载激光雷达的滩涂测量关键技术研究[J].测绘工程,2015(1):33-35.
[5]GB12327—1998.《海道测量规范》[S].
[6]程玉书,张冉,焦学军,等.机载LiDAR在河南省重要成矿区带1:5000地形图测绘中的应用[J].测绘与空间地理信息,2016(5):83-85.
[7]葛婷婷.机载LiDAR技术在滩涂地形图生产中的应用[J].数字技术与应用,2014(2):47-49.
[8]史照良,曹 敏.基于LiDAR技术的海岛礁、滩涂测绘研究[J].测绘通报,2007(5):49-51.
[9]赖祖龙,张汉德,万幼川,等.激光雷达在滩涂海岸地形测量中的应用[J].海洋测绘,2008(3):37-39.
[10]郭清风,张峰,范巍.关于LiDAR数据的滩涂、海岸带主要地物提取方法[J].地理空间信息,2011(4): 25-27.
[11]盛志鹏,吴迪,楼燕敏,等.机载LiDAR技术在浙江省滩涂测高实验中的应用研究[C].第十四届华东六省一市测绘学会学术交流会,2011(4):25-27.
[12]裘国富,吴伟如.滩涂地形测量方案[J].科技纵横,2012(6):119-120.
[13]史永忠,胡峰涛.浅谈无人机航摄结合验潮获取滩涂高程的技术[D].浙江水利科技,2013(7):188-189.
[14]宁津生,陈俊勇,李德仁,等.测绘学概论[M].武汉:武汉大学出版社,2008.
【作者简介】第一作者滕惠忠,1963出生,男,吉林长春人,高级工程师,硕士,主要从事海洋测绘遥感技术应用与研究;本文来自《海洋测绘》(2018年第2期),若其他公众平台转载,请备注论文作者,并说明文章来源,版权归《海洋测绘》所有。

长按识别图中二维码关注我们!






