【泡泡一分钟】机器人手臂姿态估计加速度计的优化配置研究
每天一分钟,带你读遍机器人顶级会议文章
标题:A Study on Optimal Placement of Accelerometers for Pose Estimation of a Robot Arm
来源:2018 IEEE International Conference on Robotics and Automation (ICRA)
编译:章绩伟
审核:颜青松,陈世浪
欢迎个人转发朋友圈;其他机构或自媒体如需转载,后台留言申请授权

摘要

本研究调查了惯性传感器放置位置和噪声特性对机器人姿态估计精度的影响。当然,大多数机器人都配备有关节角度编码器,用于姿势估计和末端执行器定位。但是,在某些情况下,在所有关节上引入编码器是不可能或不可取的。这些常见的例子包括腿式运动,双臂共同操纵和假肢。为了解决这种情况,一种解决方案是将惯性测量单元(IMU)嵌入放置在机器人肢体和身体上的人造皮肤贴片中。本研究分析了如传感器的数量,传感器在机器人上的位置,以及机器人姿态估计质量的噪声特性及其信噪比(SNR)等设计参数的影响。我们研究了使用大量IMU的好处,这可能是由于廉价的微机械传感器的激增。我们使用蒙特卡罗模拟和双链机器人臂实验来获得几个加速度计配置的预期估计误差度量值的分布,然后将其进行比较以确定IMU的最佳数量和位置。结果表明,每个链路上至少两个加速度计的放置对姿势估计误差具有最显着的影响,而使用更多数量的加速度计在减小手臂姿态估计误差和由此产生的SNR方面起不太重要的作用。
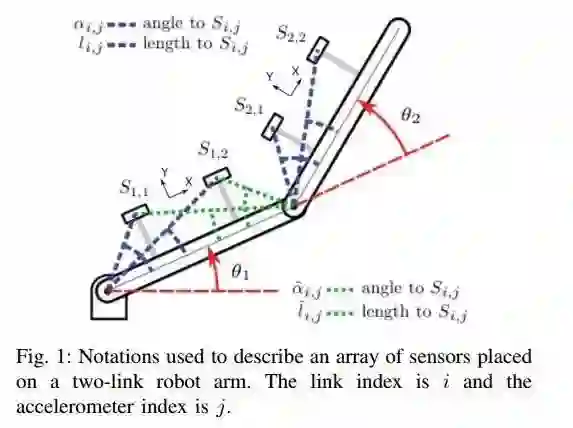
图1 用于描述放置在双连杆机器人手臂上的传感器阵列的符号。链接索引是 i,加速度计索引是 j。
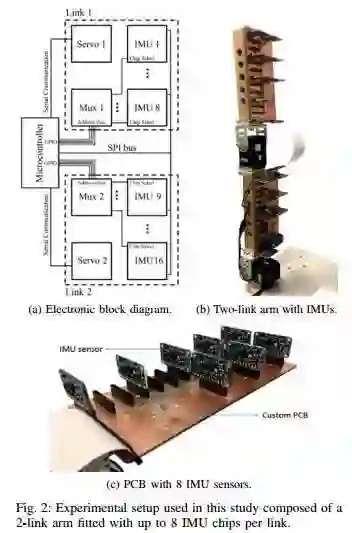
图2 本研究中使用的实验装置由双连杆臂组成,每个连杆装有多达8个IMU芯片。
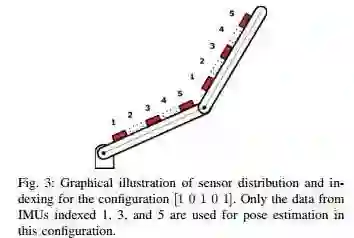
图3 配置[1 0 1 0 1]的传感器分布和索引的图形说明。在该配置中,仅将来自索引为1,3和5的IMU的数据用于姿势估计。
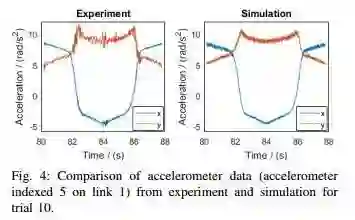
图4 来自试验10的实验和模拟的加速度计数据(链路1上的加速度计指数为5)的比较。
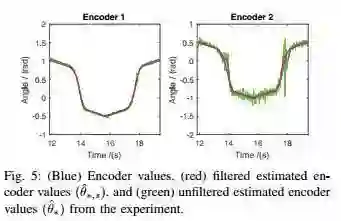
图5 (蓝色)来自实验的编码器值,(红色)滤波估计编码器值(θ*,s)和(绿色)未滤波估计编码器值(θ*)。
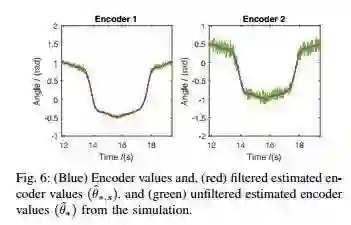
图6 (蓝色)来自模拟的编码器值和(红色)滤波的估计编码器值(θ*,s)和(绿色)未滤波的估计编码器值(θ*)。
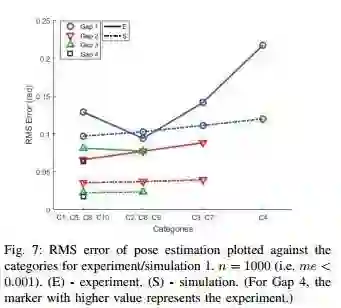
图7 姿势估计的RMS误差相对于实验/模拟的类别绘制1.n = 1000。(E) - 实验,(S) - 模拟。(对于Gap 4,具有较高值的标记代表实验)。
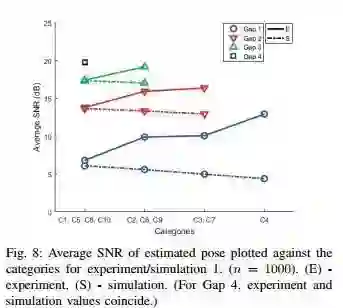
图8 估计姿势的平均SNR相对于实验/模拟1的类别绘制(n = 1000)。(E) - 实验,(S) - 模拟。(对于Gap 4,实验和模拟值重合)。
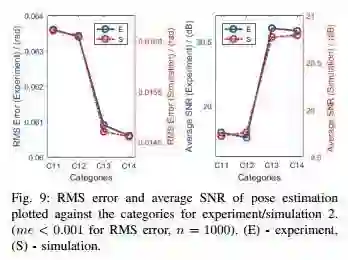
图9 RMS误差和姿态估计的平均SNR相对于实验/模拟2的类别绘制。(E)-实验,(S)-模拟。
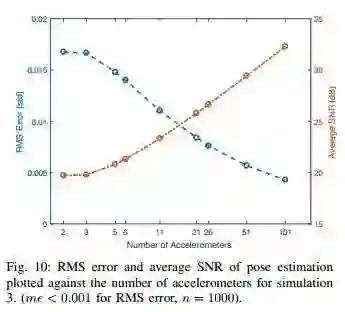
图10 RMS误差和姿态估计的平均SNR相对于模拟3的加速度计的数量绘制。

Abstract
This study investigates the effects of inertial sensor placement and noise characteristics on the accuracy of robot pose estimation. Of course, most robots are equipped with joint angle encoders for pose estimation and end-effector positioning. However, in some situations, it’s not possible or not desirable to introduce encoders on all joints. Such common examples include legged locomotion, dual arm co-manipulation, and prosthetic limbs. To tackle such situations, one solution is to embed inertial measurement units (IMUs) into artificial skin patches placed on robots’ limbs and body. This work analyzes the effects of design parameters such as the number of sensors, their placement on the robot, and noise properties on the quality of robot pose estimation and its signal-to-noise Ratio (SNR). We study the benefits of using a large number of IMUs, which is possible due to the proliferation of inexpensive micro-machined sensors. We use Monte-Carlo simulations and experiments with a two-link robot arm to obtain the distributions of expected estimation error metric values for several accelerometer configurations, which are then compared to determine the optimal number and placement for the IMUs. Results show that the placement of at least two accelerometers on each link has the most significant impact on the pose estimation error, while using a larger number of accelerometers plays a less significant role in reducing the arm pose estimation error and resultant SNR.
如果你对本文感兴趣,请点击点击阅读原文下载完整文章,如想查看更多文章请关注【泡泡机器人SLAM】公众号(paopaorobot_slam)。
百度网盘提取码:vd3m
欢迎来到泡泡论坛,这里有大牛为你解答关于SLAM的任何疑惑。
有想问的问题,或者想刷帖回答问题,泡泡论坛欢迎你!
泡泡网站:www.paopaorobot.org
泡泡论坛:http://paopaorobot.org/bbs/


泡泡机器人SLAM的原创内容均由泡泡机器人的成员花费大量心血制作而成,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
商业合作及转载请联系liufuqiang_robot@hotmail.com



