低速、慢速和小型 (LSS) 飞行平台的普及给国防和安全机构带来了新的快速增长的威胁。因此,必须设计防御系统以应对此类威胁。现代作战准备基于在高保真模拟器上进行的适当人员培训。本报告的目的是考虑到各种商用 LSS 飞行器,并从不同的角度定义 LSS 模型,以便模型可用于LSS 系统相关的分析和设计方面,及用于抵制LSS系统(包括探测和中和)、作战训练。在北约成员国之间提升 LSS 能力并将 LSS 扩展到现有分类的能力被认为是有用和有益的。
【报告概要】
在安全受到威胁的背景下考虑小型无人机系统 (sUAS)(通常称为无人机)时,从物理和动态的角度进行建模和仿真遇到了一些独特的挑战和机遇。
无人机的参数化定义包括以下几类:
- 类型学,指的是无人机可以飞行的模式;
- 用于制造无人机的材料;
- 飞行性能;
- 螺旋桨种类;
- 分类;
- 导航系统;
- 远程控制器特性(如果有);
- 有效载荷,考虑自身传感器和可能的危险;
- 通信系统。
描述无人机飞行动力学的分析模型在数学上应该是合理的,因为任务能力在很大程度上取决于车辆配置和行为。
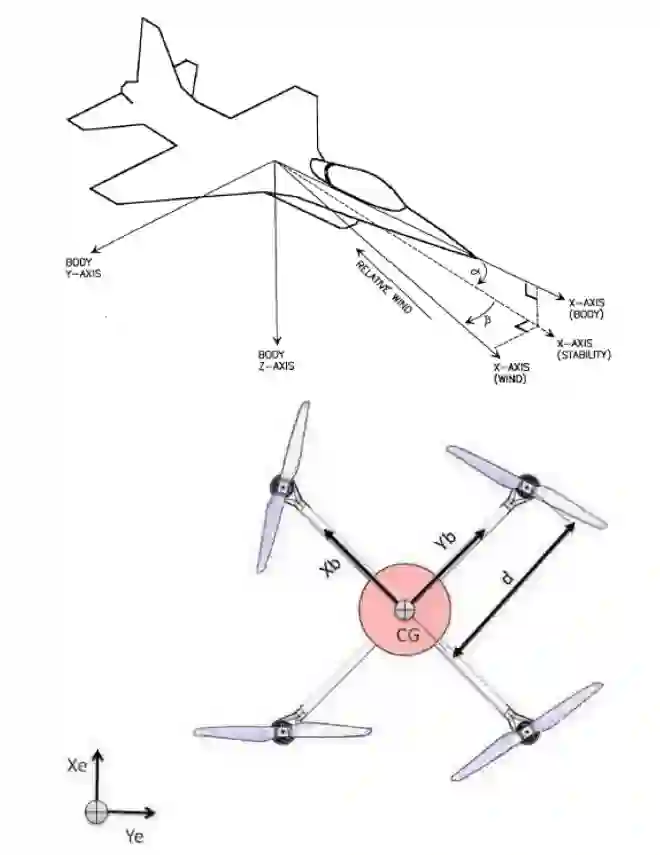
考虑到刚体在空间中的运动动力学需要一个固定在刚体本身的参考系来进行合适的力学描述,并做出一些假设(例如,刚体模型、静止大气和无扰动、对称机身和作用力在重心处),可以为 sUAV 的飞行动力学开发牛顿-欧拉方程。
在检测 sUAS 时,必须考虑几个现象,例如可见波范围内外的反射、射频、声学以及相关技术,如被动和主动成像和检测。
由于需要多个传感器检测 sUAS,因此有必要考虑识别的参数以便针对不同类型的检测器对特征进行建模。此外,对多个传感器的依赖还需要在信息融合和集成学习方面取得进步,以确保从完整的态势感知中获得可操作的情报。
无人机可探测性专家会议表明了对雷达特征以及不同无人机、雷达和场景的声学特征进行建模的可能性,以补充实验数据并帮助开发跟踪、分类和态势感知算法。此外,雷达场景模拟的适用性及其在目标建模和特征提取中的潜在用途已得到证实。
然而,由于市场上无人机的复杂性和可变性以及它们的不断增强,就其物理和动态特性对无人机签名进行清晰的建模似乎并不容易。
sUAS 特性的复杂性和可变性使得很难完成定义适合在仿真系统中使用的模型的任务。这是由于无人机本身的几个参数,以及考虑到无人机的所有机动能力和特性所需的飞行动力学方程的复杂性。
此外,sUAS 特性的复杂性和可变性不允许定义用于评估相关特征的参数模型。
图1 无人机类别与其他类别/参数的关系(part 1)
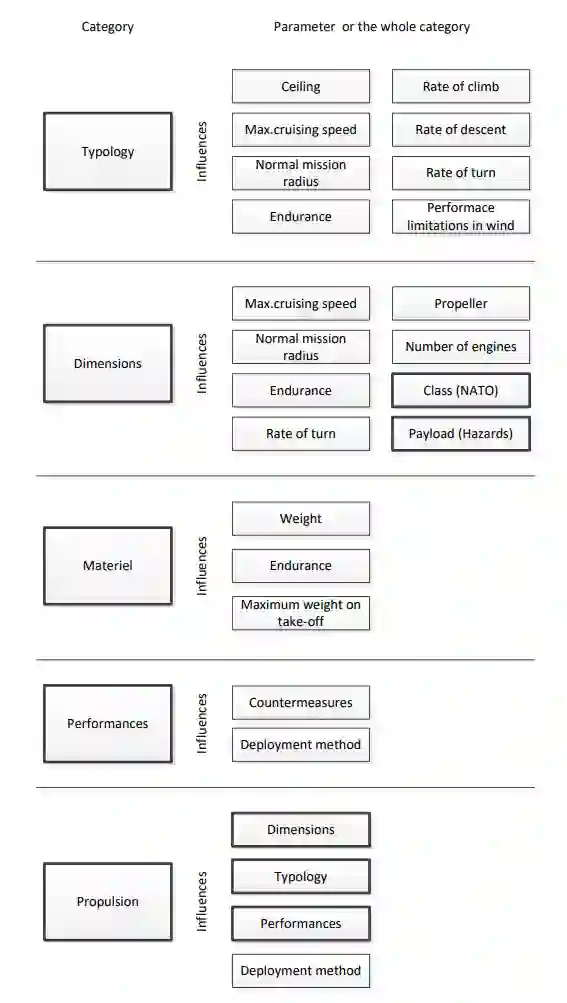
图2 无人机类别与其他类别/参数的关系(part 2)
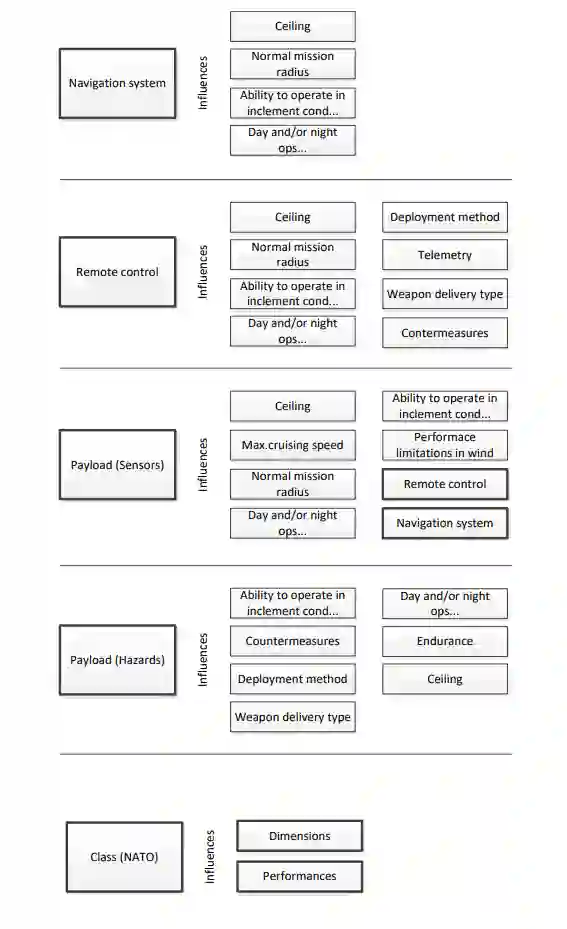
图3 参考坐标系
【报告目录】