
随着无人平台越来越多地出现在战场上,与人类一起,以不同的配置(从远程操作到完全自主的平台,有人-无人的团队,蜂群等)和领域(空间、空中、陆地、海洋和水下),也有必要使决策过程适应这一新的现实。这个过程将不再是完全由人类完成的,这就要求人类和机器对他们行动和互动的环境有一个共同的、有意义的、及时的理解,即共同的态势感知。我们将研究如何通过基于本体的推理和推理的人工智能相关技术来实现这一目标,这些技术将使所有参与者(人类和非人类)之间共享所有级别的信息(数据、知识和模型)。这项工作的成功应体现在异质实体之间实现高水平的互操作性,在此范围内,他们将能够利用彼此的最佳发展能力。
人工智能驱动的态势感知评估方法
图2展示了基于先前所述断言和要求的人工智能驱动SA评估的高级概念模型。
广泛的人工智能方法可用于支持所需的过程,适用于每个层次,从归纳法到演绎法。在归纳推理方法中,我们提到了传统的机器学习--逻辑回归(LR)、支持向量机(SVM)、Naive-Bayes(NB)或深度学习--卷积神经网络(CNN)、长短时记忆(LSTM)、门控循环单元(GRU)。演绎法是由knowledgerule系统代表的。但是,只有当系统的所有组成部分对目标、概念和关系有相同的理解时,才能以有效的方式实现各级的无缝协作。本体是实现这一目的最合适的工具(Sharman, Kishore, & Ramesh, 2004)。
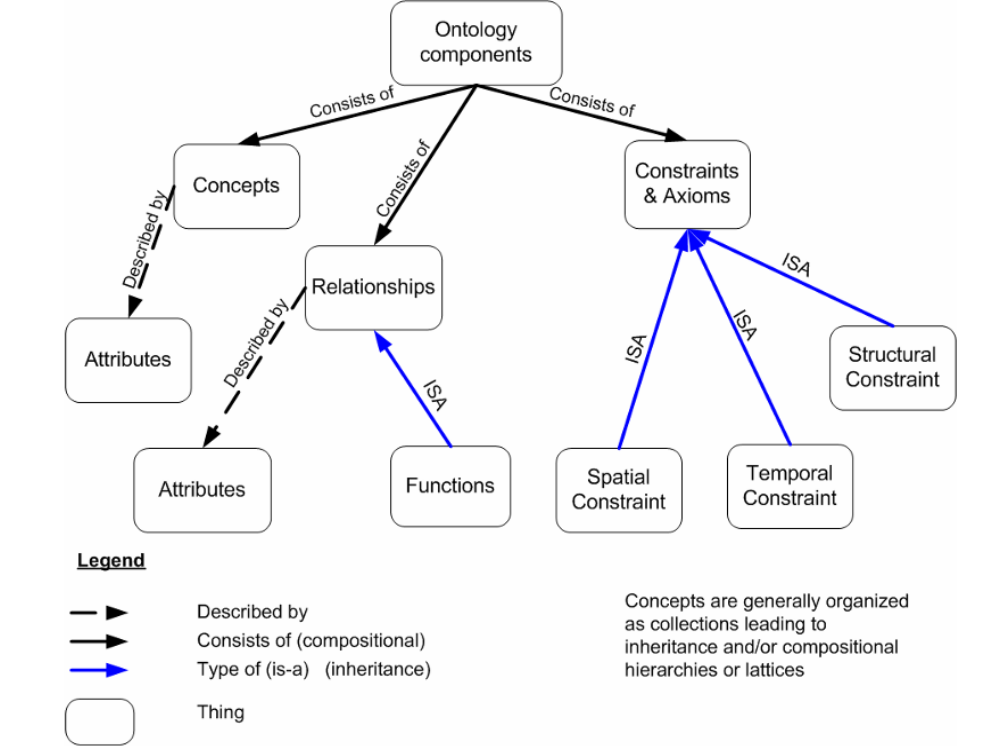
本体是对知识的正式描述,是一个领域内概念的集合以及它们之间的关系(Ontotext, 2022; Earley, 2015)。本体的组成部分在图3中显示。3,其详细的正式描述可以在Sharman, Kishore & Ramesh (2004)找到。
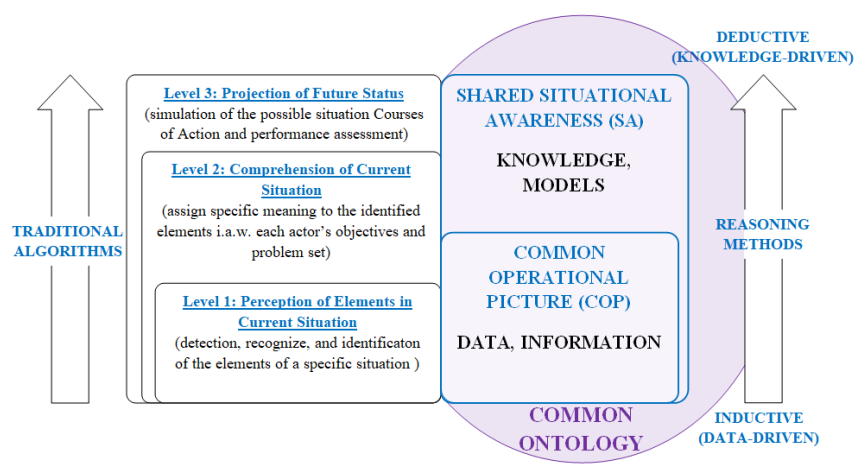
图2: AI驱动的态势感知评估概念
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年3月22日
Arxiv
17+阅读 · 2021年3月23日
Arxiv
12+阅读 · 2019年9月26日
相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2023年3月22日
Arxiv
17+阅读 · 2021年3月23日
Arxiv
12+阅读 · 2019年9月26日