

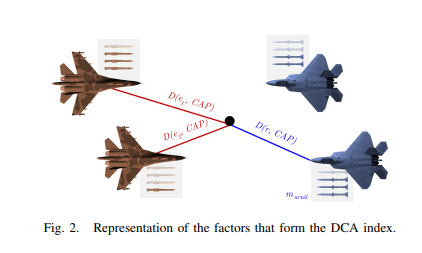
这项工作旨在为防卫性反空战(DCA)任务中的超视距(BVR)空战提供一个交战决策支持工具。在BVR空战中,交战决策是指飞行员通过采取进攻姿态和执行相应的机动动作来选择与目标交战的时机。为了对这一鞠策进行建模,我们使用了巴西空军的航空航天模拟环境(Ambiente de Simulac¸ao Aeroespacial - ASA ˜,葡萄牙语),该环境产生了3729次建设性模拟,每次持续12分钟,总共有10316次交战。我们通过一个叫做DCA指数的操作指标来分析所有的样本,该指标根据主题专家的经验,代表了这种类型任务的成功程度。这个指标考虑了同一小组飞机和对面小组飞机的距离,战斗空中巡逻的点,以及使用的导弹数量。通过定义交战开始前的状态和整个交战过程中DCA指数的平均值,我们创建了一个监督学习模型来确定新交战的质量。基于决策树算法与XGBoost库,提供了一个预测DCA指数的回归模型,其决定系数接近0.8,均方根误差为0.05,可以为BVR飞行员提供参数以决定是否交战。因此,利用通过模拟获得的数据,这项工作通过建立一个基于机器学习的BVR空战的决策支持系统做出了贡献。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2022年8月10日
Arxiv
20+阅读 · 2019年10月25日
Arxiv
11+阅读 · 2019年9月8日

相关VIP内容
相关资讯
相关论文
Arxiv
0+阅读 · 2022年8月10日
Arxiv
20+阅读 · 2019年10月25日
Arxiv
11+阅读 · 2019年9月8日