本报告描述了北约STO RTG IST-149无人地面系统和C2内互操作性能力概念演示器的研究和实验工作。无人地面车辆(UGVs)在现代战斗空间中正变得越来越重要。这些系统可以携带大量的传感器套件,从前线提供前所未有的数据流。另一方面,这些系统在大多数情况下仍然需要远程操作。重要的是要认识到,如果没有适当的方式在联盟伙伴之间交换信息和/或将其纳入C2系统,ISR数据在很大程度上将是无用的。该小组的主要目的是找到改善这种情况的方法,更具体地说,调查从操作员控制单元(OCU)控制UGV和接收数据的可能标准,并在现实世界的场景中测试它们。
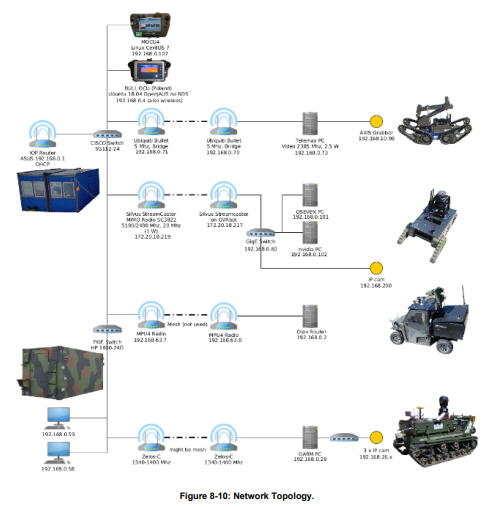
该项目的努力有两个方面。比利时的贡献是在欧盟项目ICARUS中所做的工作。这个项目涉及一个用于搜索和救援的辅助性无人驾驶空中、地面和海上车辆团队。互操作性在几个不同的实验中得到了验证。ICARUS联盟由几个国际合作伙伴组成,其中比利时是这个小组的链接。第二项工作是该小组的联合努力,在小组内进行实验,展示UGV和OCU之间的互操作性。该小组于2018年在挪威的Rena进行了最后的演示。
这两项工作都使用了无人系统联合架构(JAUS)和互操作性配置文件(IOP),以成功实现系统间的互操作性。试验表明,有可能相当容易地扩展系统,并在相对较短的时间内实现与部分标准的兼容。弗劳恩霍夫FKIE和TARDEC都开发了软件,将信息从IOP域传递到机器人操作系统(ROS),并从该系统中获取信息。ROS是一个广泛使用的软件,用于开发UGV和其他类型机器人的自主性,并被该小组的许多合作伙伴所使用。Fraunhofer FKIE和TARDEC提供的软件对试验的成功至关重要。
报告还讨论了如何在采购前利用IOP标准来定义系统的要求。该标准本身定义了一套属性,可以在采购新系统时作为要求来指定,可以是强制性要求,也可以是选择性要求。这使得采购部门更容易定义要求,供应商也更容易符合要求,同时也明确了OCU在连接到系统时,在控制系统和可视化系统中的数据方面需要具备哪些能力。
该小组2018年在挪威瑞纳的试验重点是对UGV进行远程操作,以及接收UGV的位置和视频反馈。由于这是一次成功的试验,下一步将是使用更高层次的控制输入和反馈来测试互操作性,例如,向UGVs发送航点,并根据系统的感知接收系统周围环境的地图。