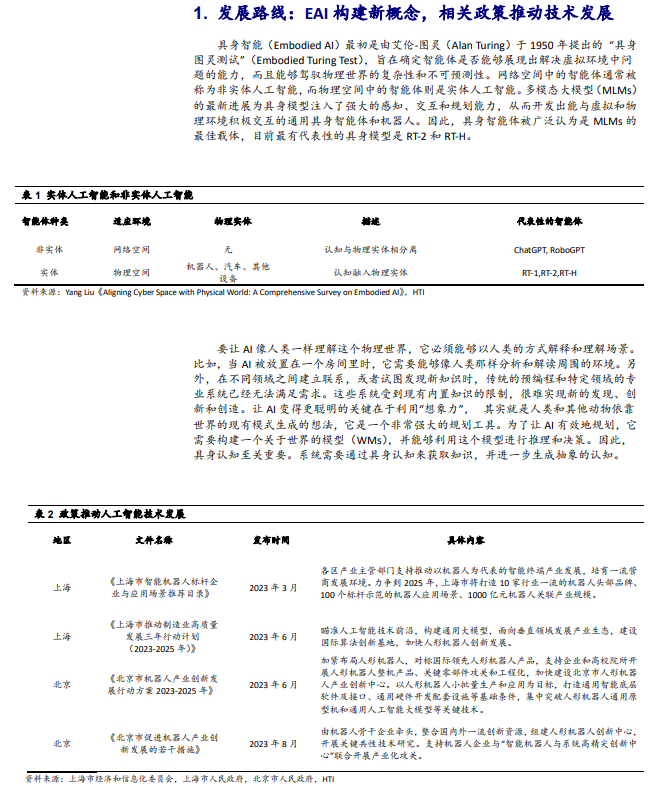
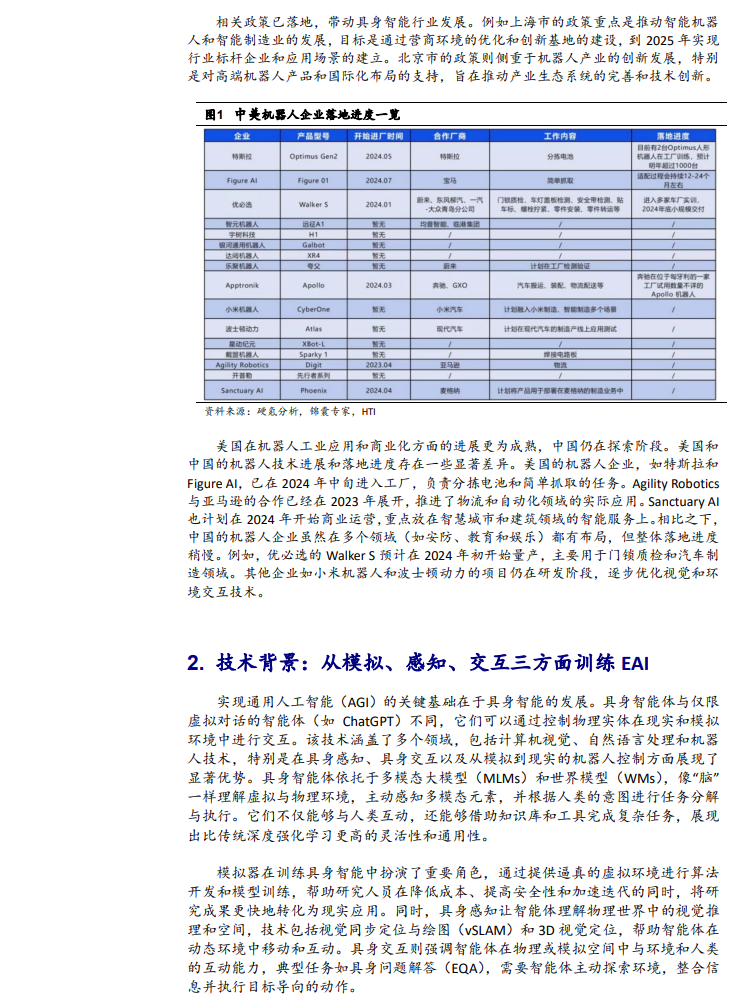
EAI构建新概念,相关政策推动技术发展:具身智能(Embodied AI,EAI)由艾伦·图灵于1950年提出,通过“具身图灵测试”验证智能体是否能处理物理世界的复杂性。具身智能体不同于仅在网络空间中运作的非实体人工智能,它们结合了多模态大模型(MLMs)和世界模型(WMs),具备强大的感知、交互和规划能力,能够在虚拟和物理环境中主动适应并执行任务。相比传统的预编程系统,具身智能体更依赖于构建世界模型和想象力,以实现复杂的推理和决策。目前,上海和北京等地陆续出台政策,推动智能机器人和制造业的高质量发展,上海目标到2025年实现行业标杆企业的建立。海外方面,美国在机器人工业应用和商业化方面的进展更为成熟,中国仍在探索阶段。
从模拟、感知、交互三方面训练具身智能:模拟器在训练具身智能中扮演了重要角色,通过提供逼真的虚拟环境进行算法开发和模型训练,帮助研究人员在降低成本、提高安全性和加速迭代的同时,将研究成果更快地转化为现实应用。另外,具身感知让智能体理解物理世界中的视觉推理和空间,技术包括视觉同步定位与绘图(vSLAM)和3D视觉定位,帮助智能体在动态环境中移动和互动。具身交互则强调智能体在物理或模拟空间中与环境和人类的互动能力,典型任务如具身问题解答(EQA),需要智能体主动探索环境,整合信息并执行目标导向的动作。 具身智能产品多样,覆盖广阔市场:不同类型的机器人在各自的应用领域中展现出重要的功能和价值。1)固定式机器人因其高精度和稳定性,广泛应用于实验室自动化、教育和工业制造。2)轮式机器人在物流、仓储和安全检查中表现优异,而履带式机器人适用于农业、建筑和军事等复杂地形。3)四足机器人因其稳定性和适应性,广泛用于复杂地形探索、救援任务和军事行动。4)人形机器人在服务业、医疗保健和协作环境中日益普及,应用于智能交互、精密制造和医疗手术等领域。各类机器人在多种应用场景中展现独特优势,同时也面临不同的技术挑战。