

图为 2023 年 12 月 20 日拍摄的乌克兰第一人称视角(FPV)无人机。乌克兰已生产了五万多架 FPV 无人机。(图片由乌克兰战略工业部提供)
人工智能(AI)的普及和快速发展正以前所未有的速度重塑多域作战(MDO)中的攻防行动。人工智能的进步为作战人员提供了无数新的能力,而这些能力曾经只是科幻小说中的想象。人工智能正以机器速度加快数据收集、处理、分析和利用的准确性,从而缩短指挥官的 OODA(观察、定位、决策、行动)循环周期。人工智能还在增强以前主要由人类完成的流程。例如,人工智能可以从各种传感器类型的多个无人机系统(UAS)镜头中检测出感兴趣的目标。大型语言模型(LLM)还可以综合来自不同平台的大数据,例如将图像、社交媒体帖子和情报报告结合起来,按需向指挥官提供作战环境(OE)的全面概述。人工智能还能使情报、监视和侦察(ISR)平台和武器系统完全自动化。尽管取得了这些进步,但人工智能在 MDO 中的应用也带来了无数技术、道德和法律方面的挑战。本文将讨论这些挑战,并对未来的发展提出建议。
多域作战中的目标检测
人工智能是计算机科学的一个广泛领域,其重点是创建能够执行通常需要人类智能才能完成的任务的系统。这些任务包括决策、解决问题、理解语言以及识别模式或目标。人工智能模型旨在模仿人类的认知功能,通过将数据应用于卷积神经网络(CNN)来实现。数据质量和 CNN 优化是推进人工智能模型的两个最重要因素。机器学习(ML)是人工智能的一个子集,可执行特定的重复性功能。此外,ML 系统还可以根据输入数据调整 CNN 内的神经连接,从而在没有人工干预的情况下,通过迭代训练周期(称为 “epochs”)提高性能。目前,MDO 中使用最广泛的 ML 应用是目标检测。目标检测使用计算机视觉来检测图像和视频片段中感兴趣的目标。图 1 是目标检测的一个示例。在人工智能领域,目标检测模型最容易训练和部署,是 MDO 的最佳选择。Maven 项目是美国军方正在实施的一个项目,该项目将目标检测算法应用于 ISR 获取的片段和图像。然而,与任何人工智能模型一样,建立目标检测模型的挑战在于需要高质量的数据通过 CNN 来训练模型。
收集高质量数据是训练可靠的 ML 模型所必需的一个具有挑战性的过程。目标检测模型的性能直接取决于训练数据的质量。在 MDO 期间收集数据将是在 OE 中部署根据新的敌方装备和战术、技术和程序 (TTP) 训练的目标检测模型的最大障碍之一。在 MDO 中,敌方很可能会使用一些技术来欺骗目标检测模型。在高作战节奏的战斗中,收集、整理和共享良好的数据,以便根据新出现的敌方装备和战术、技术和程序重新训练 ML 模型将是非常困难的。不同角度和光照条件下敌方装备的数据多样性对于实现弹性目标检测模型至关重要。此外,由于边缘对比度降低、热交叉(当目标的温度与其背景相似时)和图像劣化,空中目标检测模型的训练比地面模型更具挑战性。一旦建立了敌方装备数据集,部队就可以根据任务要求建立目标检测模型。例如,在大规模作战行动中,部队可以部署一个在高价值目标数据集上训练的定制目标检测模型。
经过模型训练后,目标检测模型可部署在手机大小的计算机上,这些计算机被称为边缘设备。这些边缘设备价格低廉,可轻松连接到无人飞行器地面站,为现有无人平台提供机载人工智能功能。在多域进攻和防御行动中部署目标检测算法的主要好处是,它们能够快速、稳定地处理大量视频和图像片段,只需极少的人工参与。例如,一个分部的分析和控制部门可以利用一系列具有定制训练的目标检测模型的边缘设备来分析多个 ISR 视频馈送。然而,MDO 中目标检测面临的最大挑战是如何更新成百上千的边缘设备,使其具备根据新的敌方装备和 TTPs 训练的最新模型。这还包括如何将由图像和标签组成的数据集传输到整个 OE 的各单位。传输这些大型数据集需要大量的带宽和时间,而在面对近似对手的情况下,这是极不可能实现的。目前,还没有解决这一问题的可行方案。
目标检测模型也可以在多个光谱范围内进行训练,从近红外(NIR)到长波红外(LWIR),也称为热光谱。选择合适的传感器类型,从地面或空中侦察系统中进行目标检测,对于 ML 应用至关重要。由于边缘检测是计算机视觉模型的基础,因此为 ISR 目标检测性能选择合适的传感器至关重要。图 2 的 D/E/F 部分显示了计算机视觉模型如何 “看到 ”图像。目标检测算法会对自身进行训练,以检目标体独特的外部和内部边缘,从而准确检测和识别感兴趣的目标。
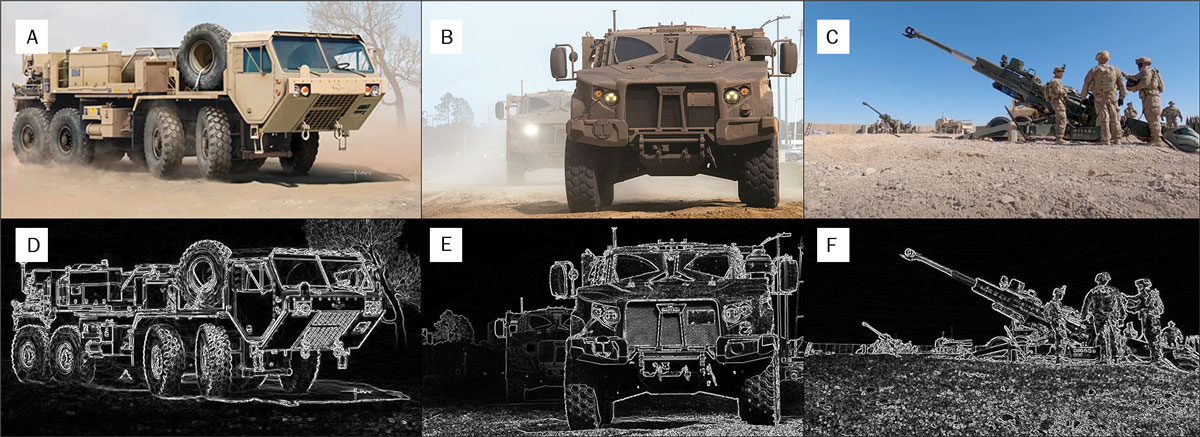
图 2. 计算机视觉模型感知图像。这些示例展示了计算机视觉模型如何感知图像。突出显示的边缘有助于模型的训练和检测。用伪装削弱这些边缘是击败对抗性目标检测模型的关键。(图:Jim Gallagher 少校)
在能见度有限的情况下开展行动时,长波红外传感器是目标探测的最佳选择。图 3 是一个例子:一个近红外目标检测模型识别出一个人,而一个近红外传感器未能识别出同一个人。同一边缘设备上的单独机器学习模型还可以融合多种传感器类型,创建弹性更强的目标检测模型,从而在复杂的照明条件下继续执行任务。
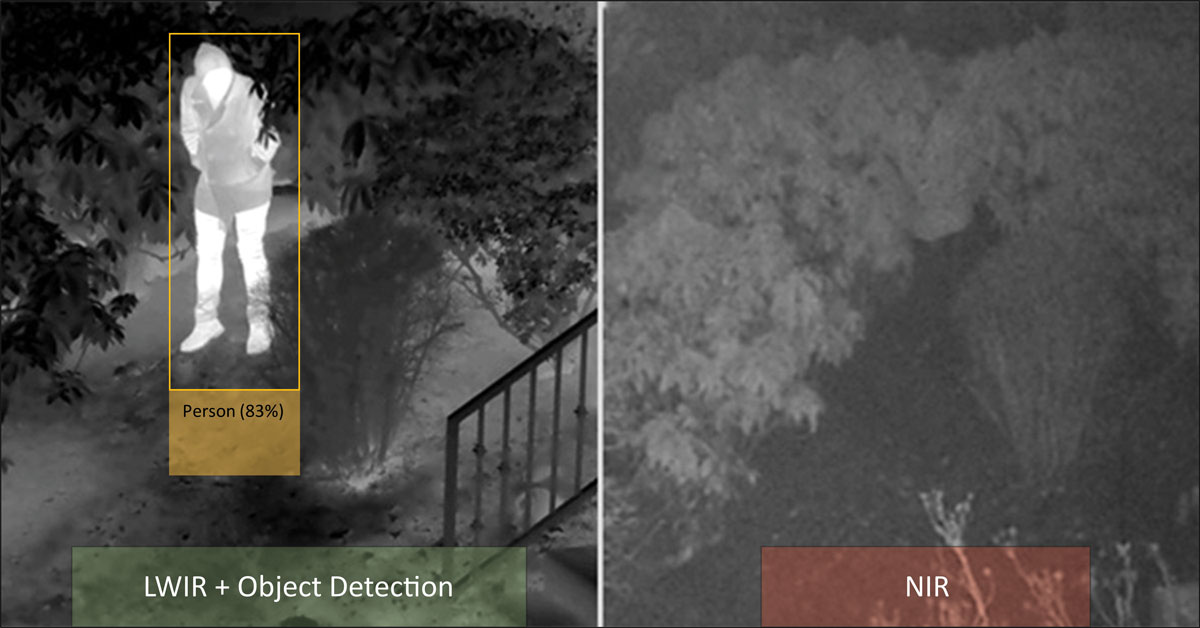
图 3. 无人机长波红外/近红外传感器探测。基于无人机的长波红外 (LWIR) 传感器成功探测到一个人(左图),而相同环境下的近红外 (NIR) 传感器未能探测到该人。(图片由 Teledyne FLIR 提供)
例如,在清晨航海黄昏开始(BMNT,日出前一小时)和傍晚航海黄昏结束(EENT,日落后一小时)期间,小型无人机系统的可见光摄像机和近红外摄像机可融合创建目标的复合边缘,从而提高性能。以往的研究发现,采用独立的机器学习模型进行自适应传感器融合可提高目标检测性能。图 4B 是使用联合 RGB 和 LWIR 传感器融合图像的示例。将此方法应用于现有无人机系统的不足之处在于,大多数军用无人机系统都携带近红外传感器,而近红外传感器在目标探测应用中的效果不如长波红外传感器。

图 4. 将传感器融合在一起。将多个传感器融合在一起可创建额外的冗余边缘,从而提高模型性能。(图:吉姆-加拉格尔少校)
将目标检测与目标定位相结合
在进攻和防御行动中部署目标探测模型时,地面和空中传感器探测到的敌方装备将自动被引导到打击单元,士兵可以在那里确认目标。在确认探测结果为敌方后,目标及其相关元数据将开始进入 D3A(决定、探测、交付、评估)目标循环。采用目标检测模型来帮助识别敌方目标,将加快 D3A 瞄准周期,提供一致的检测结果,并大大减少分析 ISR 镜头所需的士兵人数。
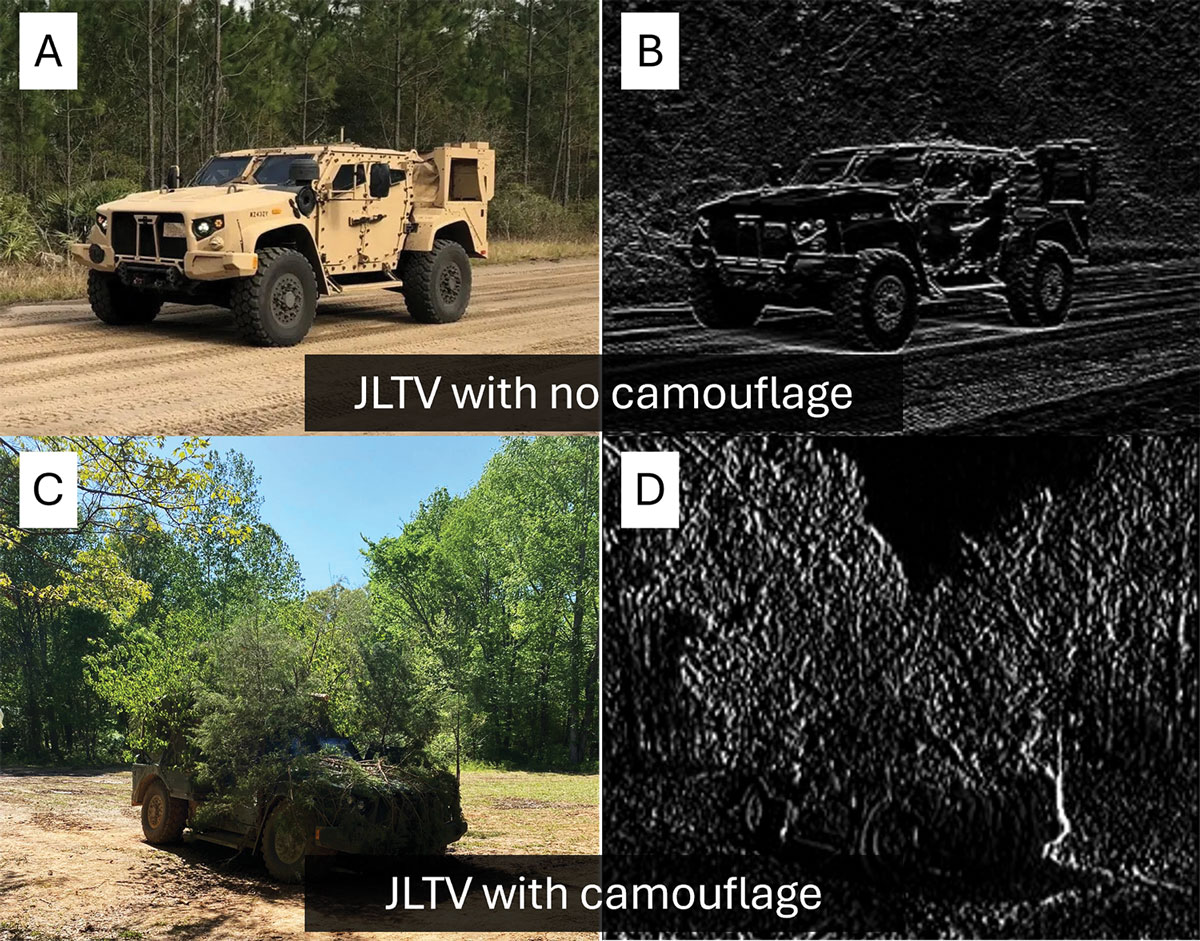
图 5A/B. 具有目标探测功能的地面和空中传感器。具有目标探测功能的地面和空中传感器可轻松识别无伪装的联合轻型战术车辆(图像 A 和 B)。相反,没有可探测边缘的图像(C 和 D)则很难被目标探测模型探测到。(图:吉姆-加拉格尔少校)
目标检测模型的一个主要弱点是,敌方可以通过各种方法降低算法的性能或使其失效。例如,采用可见光传感器的目标检测模型可以通过伪装来破坏目标的边缘,从而使其失效。图 5C 和 5D 是一辆联合轻型战术车辆的示例,用树叶伪装破坏了其边缘,导致目标探测算法无法探测到目标。如果士兵没有观看 ISR 信号,这将是一个漏掉的目标。此外,将伪装网罩在装备上而不使用扩张器破坏目标边缘,也不足以破坏目标探测模型。图 6 展示了带有保护罩的 M119 榴弹炮。由于榴弹炮的轮廓清晰可辨,地面目标探测模型仍能探测到被遮盖的 M119 榴弹炮,置信度为 41%。树叶和其他材料(如图 5C 所示)必须用来破坏目标的边缘,从而降低目标探测模型的性能。由于可见光传感器的局限性和容易破坏目标探测模型,近红外和长波红外传感器更适合探测目标。然而,热特征可以被掩盖或完全覆盖,从而破坏计算机视觉模型。

图 6. 通过地面目标探测模型进行探测。由于边缘可识别,地面目标探测模型可探测到覆盖的 M119 榴弹炮。(图:吉姆-加拉格尔少校)
自主弹药的目标探测
在多领域攻防行动中,另一种可提高杀伤力的人工智能应用是将目标探测与目标跟踪相结合,自主引导弹药攻击目标。通过与飞行控制器相连的车载边缘设备,自主飞行器可在空中、地面和海上引导弹药。边缘设备的价格低至 35 美元,因此部署具有目标跟踪模型的低成本无人驾驶系统既经济又高效。例如,无人地面运载工具(UGV)可部署目标探测和跟踪模型,以探测并向敌方目标发射弹药。图 7 显示了一个带有机载目标探测和跟踪模型的 UGV,它可以引导和引爆低成本 3D 打印的形状装药,打击装甲车辆。该 UGV 是指挥与总参谋学院项目的一部分。

图 7. 无人地面车辆。这辆在指挥与总参谋学院制造的无人地面车辆配备了车载目标探测和目标跟踪模型,可以自主瞄准装甲车并启动 3D 打印铜质形状装药。(摄影:吉姆-加拉格尔少校)
在无人系统上附加红外和可见光传感器,并进行机载目标探测和跟踪,也将提高模型性能和瞄准效果,而不受光照条件的影响。乌克兰军队已经在部署带有机载边缘装置的半自主多旋翼无人机,自主将弹药飞向俄罗斯坦克(图 8)。还可部署无人潜航器 (UUV),自主将弹药射入敌方船只。此外,将目标探测模型与无人系统相结合,可使其不易受到 GPS 干扰,因为目标探测和目标跟踪不需要 GPS。然而,在 MDO 中使用全自动弹药的主要风险是自相残杀的风险。虽然在 UGV 或 UUV 等慢速移动的无人系统中,自相残杀的可能性较低,但在快速移动的无人机中,如果目标探测模型出现误报,将友方系统探测为敌方系统,就会增加自相残杀的风险。在神经网络进一步发展,将探测置信度提高到合理水平之前,在友军附近部署完全自主的无人机群仍是遥不可及的设想。

图 8. 乌克兰低成本无人机。乌克兰战斗机将弹药拉链绑在低成本无人机的框架上。(图片由乌克兰国防部国防工业提供)
利用深度学习进行预测分析
在讨论如何在 MDO 中使用深度学习人工智能模型之前,有必要先讨论如何使用简单的机器学习算法进行数据处理。现有的 ML 算法,如语音到文本转换器、文本阅读器和光学字符识别,可以使进入指挥所的大数据变得有意义。机器学习模型可以处理来自上层和下层战术互联网系统的数据,使数据对深度学习模型具有机器可读性,便于指挥官快速了解态势。
数据处理后,深度学习算法(如 LLM)可以综合数据,为指挥官提供预测分析。这种分析基于无人系统上的目标探测模型、友军报告和情报得出的处理数据。LLM 的主要缺点是计算密集且难以训练。在野外环境中训练新的 LLM 十分困难,因为这需要大量的数据、时间和计算资源。因此,应在有充足时间和处理能力的驻军环境中训练 LLM,以建立模型。
一旦建立了 LLM、数据处理和目标探测模型,最后就可以将模型和数据管道组件化,进行人工智能驱动的目标定位。图 9 展示了之前讨论过的所有 AI/ML 算法如何以 D3A 为框架进行工作。在 D3A 的决定部分,LLM 会根据已知的敌方组成和部署情况,向指挥官提供最有可能的敌方行动路线的初步评估,而敌方组成和部署情况则来自情报报告、友军报告以及无人机、地面和海上系统的目标探测结果。由于 LLM 接受过敌方理论培训,并可获取 OE 地形数据,因此它将对敌方行动路线进行预测分析,并建议在何处集中收集资产。
在探测阶段,具有目标探测模型的无人系统将利用多种传感器类型探测敌方装备和位置,然后将其发送给打击单元。在投送阶段,先进野战炮兵战术数据系统内置的机器学习算法可推荐向目标投送效果的最佳资产。最后,在 D3A 的评估阶段,LLM 可以利用目标探测提供性能衡量标准,以确认敌方装备是否被摧毁,并根据后续情报报告提供效果衡量标准,以分析敌方的反击或反应。这种由人工智能驱动的 D3A 循环可以高度迭代,因为它只需要极少的时间和少量的人力参与,从而使指挥官能够更快地做出更好的决策,进一步使敌人失去同步性。
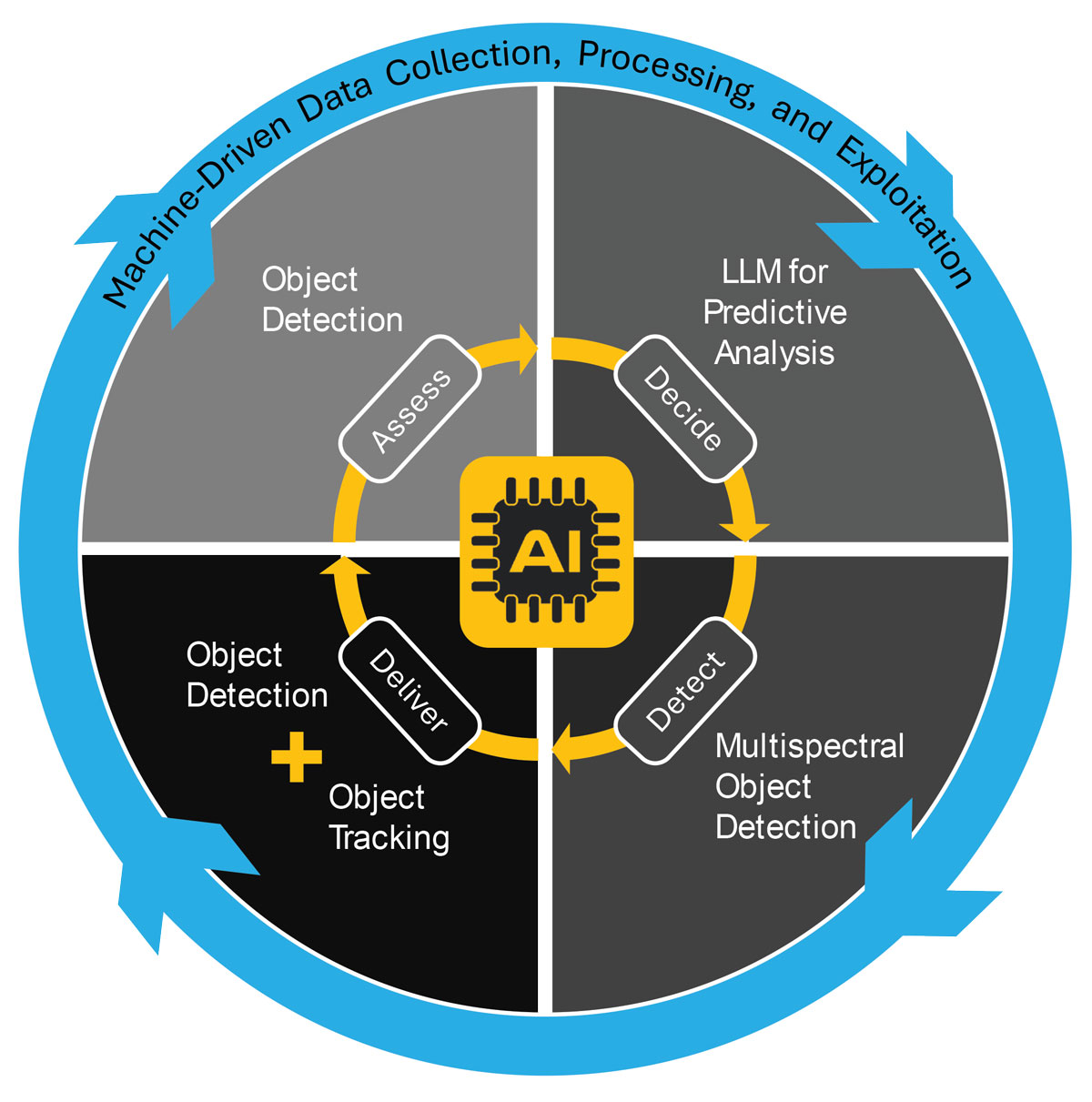
图 9. 实施人工智能/机器学习。以 D3A 为框架,图示如何将人工智能/机器学习应用到多域目标定位行动中。(图:吉姆-加拉格尔少校)
结论
将人工智能融入 MDO 代表着军事战略和能力的转型,带来了前所未有的机遇和挑战。人工智能能够提高数据处理的速度和准确性,并在战场上产生效果,这正在重塑现代战争的态势。然而,在 MDO 中采用人工智能系统并非没有不足之处。技术上的挑战和道德上的考量要求我们在将人工智能整合到军队中时,必须采取谨慎而有序的方法。人工智能系统有可能被对手的战术所欺骗,在分布式网络中管理和更新人工智能模型也很困难,这些都凸显出需要针对战场环境的复杂性量身定制稳健、弹性和轻量级的人工智能解决方案。人工智能能力的发展有望进一步增强 MDO 的战略、作战和战术优势。然而,在取得这些进步的同时,还必须进行严格的测试,以应对自主和半自主武器系统及 LLM 的更广泛影响。随着我们向人工智能日益集成的未来迈进,重点必须始终放在以可控和系统的方式开发和部署人工智能上,以增强美军在多域作战中的能力,同时认真考虑并减轻相关的风险和挑战。

