
多旋翼小型无人驾驶航空系统(sUAS),通常被称为无人机,近年来已经充斥了商业市场[1]。虽然这些sUAS的技术能力令人印象深刻,但在自主行为领域仍然存在能力差距。完全自主的无人机还没有强大的商业驱动力,因为大多数商业飞行员都希望获得驾驶无人机的经验。即使在安全行动中,目前的无人机也提供了适度的自主性,例如基本的避碰和自主起飞和着陆[2],但市场上还没有一种无人机能够为各种任务区域提供完全自主的功能。美国防部(DoD)、国土安全部(DHS)和地方执法机构将受益于在一些利基任务领域拥有完全自主能力的sUAS,包括搜索和救援监视、远程通信中继、远程目标就位、以及对敌对无人机系统(UAS)的自主追击等(见图1)。
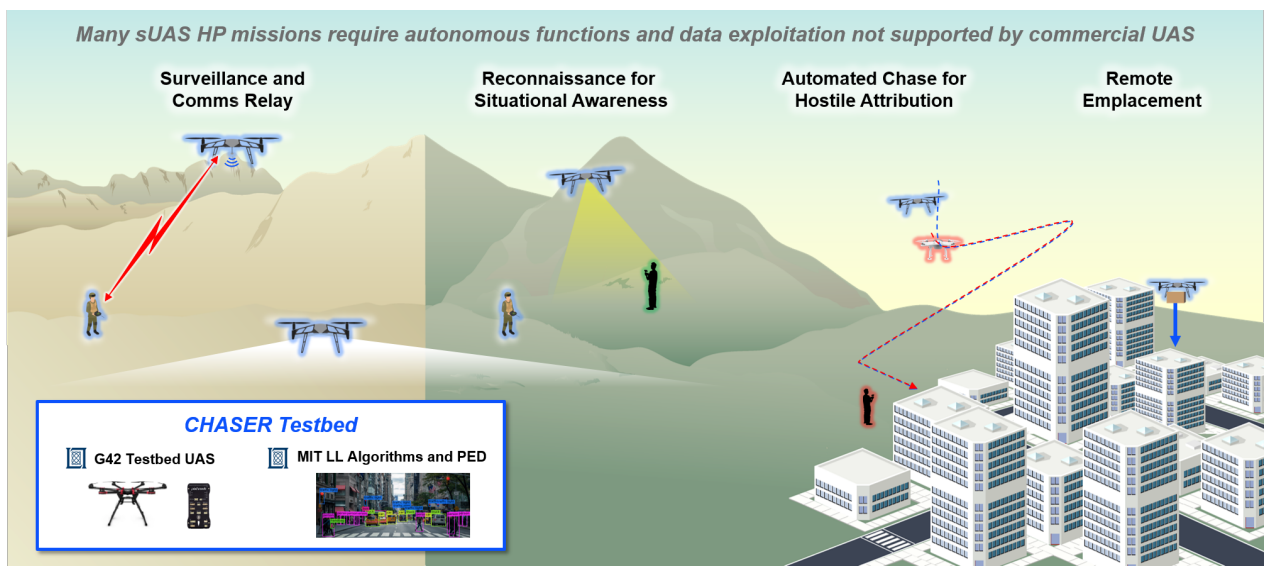
图1. 国土保护自主无人机任务。
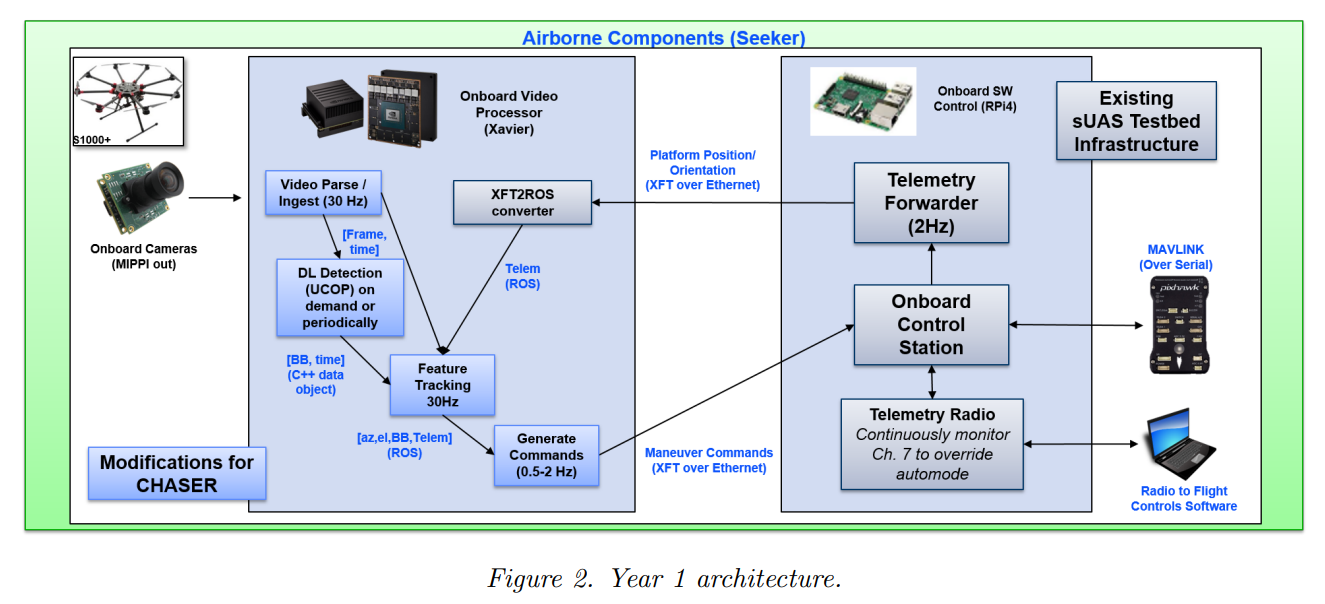
在“追逐者”项目的第一年,我们组装了一个由S1000直升机平台、机载NVIDIA Jetson Xavier GPU和econ 4k e-CAM130CUXVR相机组成的初始测试平台(见图2)。我们成功地演示了一个闭环、机载、基于自主计算机视觉的检测、跟踪和控制系统,该系统能够在飞行中跟踪另一个sUAS。
在第一年演示成功的基础上,在第二年,我们将重点从空中追击扩展到包括执行链的启动,包括从监视提示自动发射,飞到提示点,以及在没有飞行更新提示的情况下有效搜索空间。为了识别跟踪无人机的雷达航迹,只发送入侵无人机的线索,我们还开发了GPS/雷达航迹关联算法。
成为VIP会员查看完整内容
相关内容

Arxiv
0+阅读 · 2023年7月28日
Arxiv
0+阅读 · 2023年7月27日
Arxiv
0+阅读 · 2023年7月26日
Arxiv
0+阅读 · 2023年7月26日
Arxiv
11+阅读 · 2019年10月30日
相关主题

相关VIP内容
相关资讯