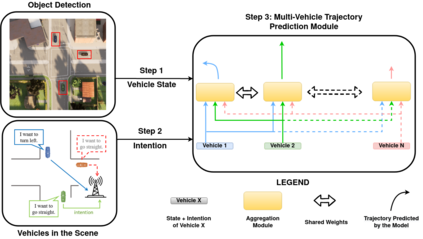
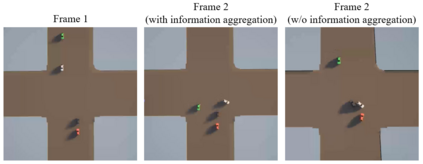
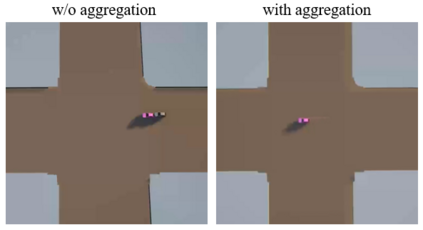
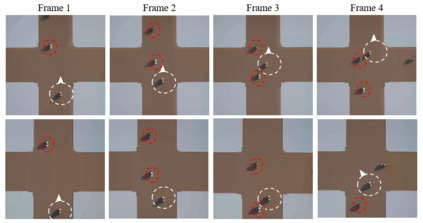
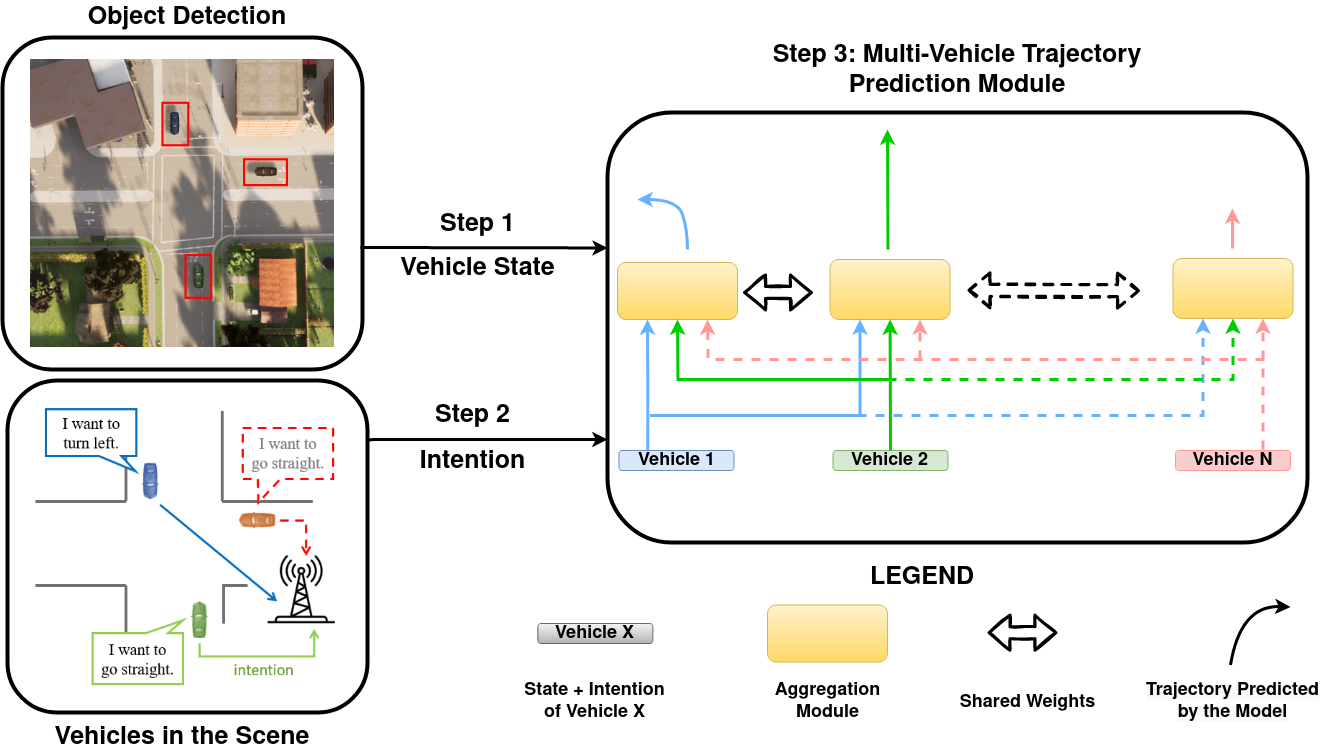
Traditional approaches to prediction of future trajectory of road agents rely on knowing information about their past trajectory. This work rather relies only on having knowledge of the current state and intended direction to make predictions for multiple vehicles at intersections. Furthermore, message passing of this information between the vehicles provides each one of them a more holistic overview of the environment allowing for a more informed prediction. This is done by training a neural network which takes the state and intent of the multiple vehicles to predict their future trajectory. Using the intention as an input allows our approach to be extended to additionally control the multiple vehicles to drive towards desired paths. Experimental results demonstrate the robustness of our approach both in terms of trajectory prediction and vehicle control at intersections. The complete training and evaluation code for this work is available here: \url{https://github.com/Dekai21/Multi_Agent_Intersection}.
翻译:预测道路物剂未来轨迹的传统方法取决于了解有关其过去轨迹的信息,这项工作仅依赖于了解当前状况和预期方向,以便预测交叉路口的多辆车辆;此外,车辆之间传递这种信息的信息为每个车辆提供了更全面的环境概览,以便作出更知情的预测;这是通过培训一个神经网络来实现的,该网络以多辆车辆的状态和意图为基础,预测其未来轨迹。利用这一意图,我们的方法得以扩展,以进一步控制多辆车辆驶向所希望的道路。实验结果表明,我们的方法在轨迹预测和交叉路口车辆控制两方面都很稳健。关于这项工作的完整培训和评价代码在这里提供:url{https://github.com/Dekai21/Multi_Agent_Intercect}。