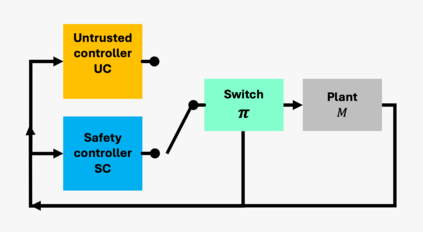
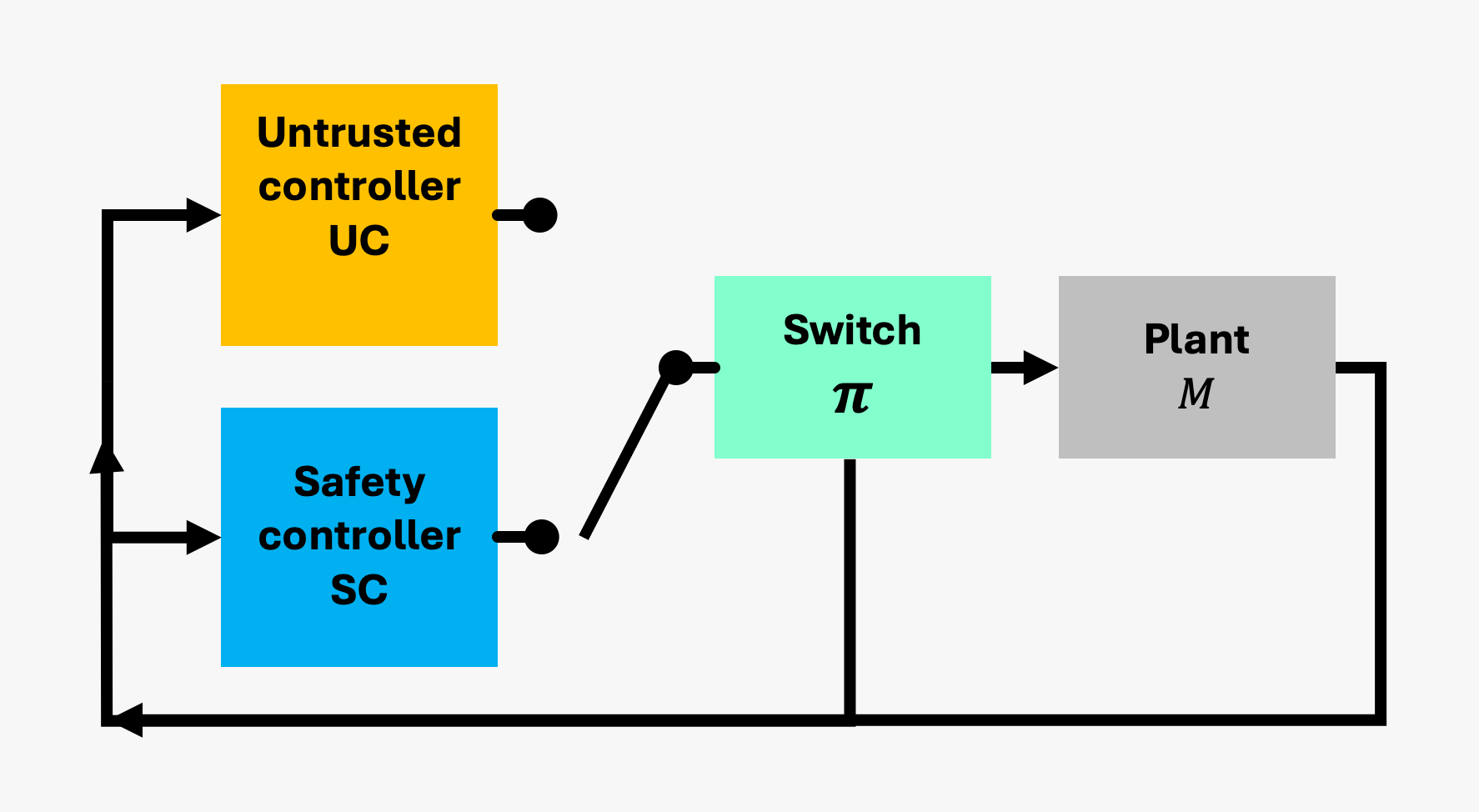
A runtime assurance system (RTA) for a given plant enables the exercise of an untrusted or experimental controller while assuring safety with a backup (or safety) controller. The relevant computational design problem is to create a logic that assures safety by switching to the safety controller as needed, while maximizing some performance criteria, such as the utilization of the untrusted controller. Existing RTA design strategies are well-known to be overly conservative and, in principle, can lead to safety violations. In this paper, we formulate the optimal RTA design problem and present a new approach for solving it. Our approach relies on reward shaping and reinforcement learning. It can guarantee safety and leverage machine learning technologies for scalability. We have implemented this algorithm and present experimental results comparing our approach with state-of-the-art reachability and simulation-based RTA approaches in a number of scenarios using aircraft models in 3D space with complex safety requirements. Our approach can guarantee safety while increasing utilization of the experimental controller over existing approaches.
翻译:暂无翻译