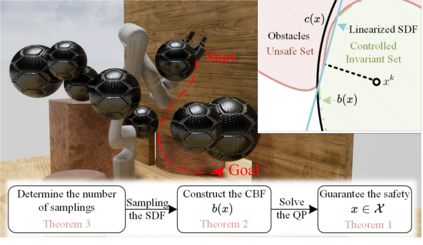
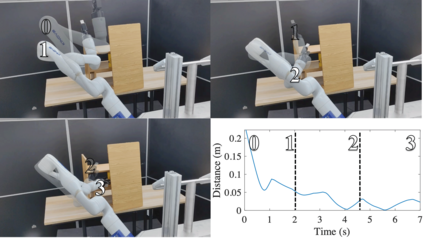
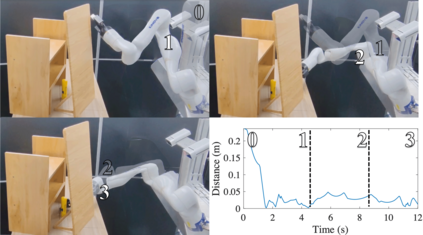
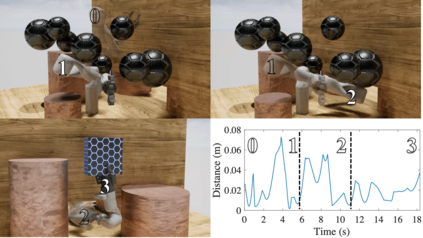
Designing safety-critical control for robotic manipulators is challenging, especially in a cluttered environment. First, the actual trajectory of a manipulator might deviate from the planned one due to the complex collision environments and non-trivial dynamics, leading to collision; Second, the feasible space for the manipulator is hard to obtain since the explicit distance functions between collision meshes are unknown. By analyzing the relationship between the safe set and the controlled invariant set, this paper proposes a data-driven control barrier function (CBF) construction method, which extracts CBF from distance samples. Specifically, the CBF guarantees the controlled invariant property for considering the system dynamics. The data-driven method samples the distance function and determines the safe set. Then, the CBF is synthesized based on the safe set by a scenario-based sum of square (SOS) program. Unlike most existing linearization based approaches, our method reserves the volume of the feasible space for planning without approximation, which helps find a solution in a cluttered environment. The control law is obtained by solving a CBF-based quadratic program in real time, which works as a safe filter for the desired planning-based controller. Moreover, our method guarantees safety with the proven probabilistic result. Our method is validated on a 7-DOF manipulator in both real and virtual cluttered environments. The experiments show that the manipulator is able to execute tasks where the clearance between obstacles is in millimeters.
翻译:对机器人操控者进行安全关键的设计控制是困难的,特别是在一个混乱的环境里。首先,操纵者的实际轨迹可能偏离计划轨迹,因为碰撞环境复杂,而且没有三边动态,导致碰撞;其次,操纵者的可行空间很难获得,因为碰撞模件间相碰撞的明显距离功能并不为人知。通过分析安全套件与受控变幻装置之间的关系,本文件建议了一种数据驱动的控制屏障功能(CBF)构建方法,它从距离样本中提取 CBF。具体地说,CBF为考虑系统动态而保证受控的变量属性。数据驱动方法抽查了距离功能并确定了安全套件。然后,CBFF根据基于假设的平方形(SOS)程序设定的安全空间。与大多数基于线性的方法不同的是,我们的方法保留了可行的规划空间的数量,而这种空间有助于在封闭的环境中找到解决办法。控制法是通过在现实时间中解决基于CBFFF的四边程序,该程序抽取了距离功能,然后决定了安全的设置了我们所期望的清理方法。