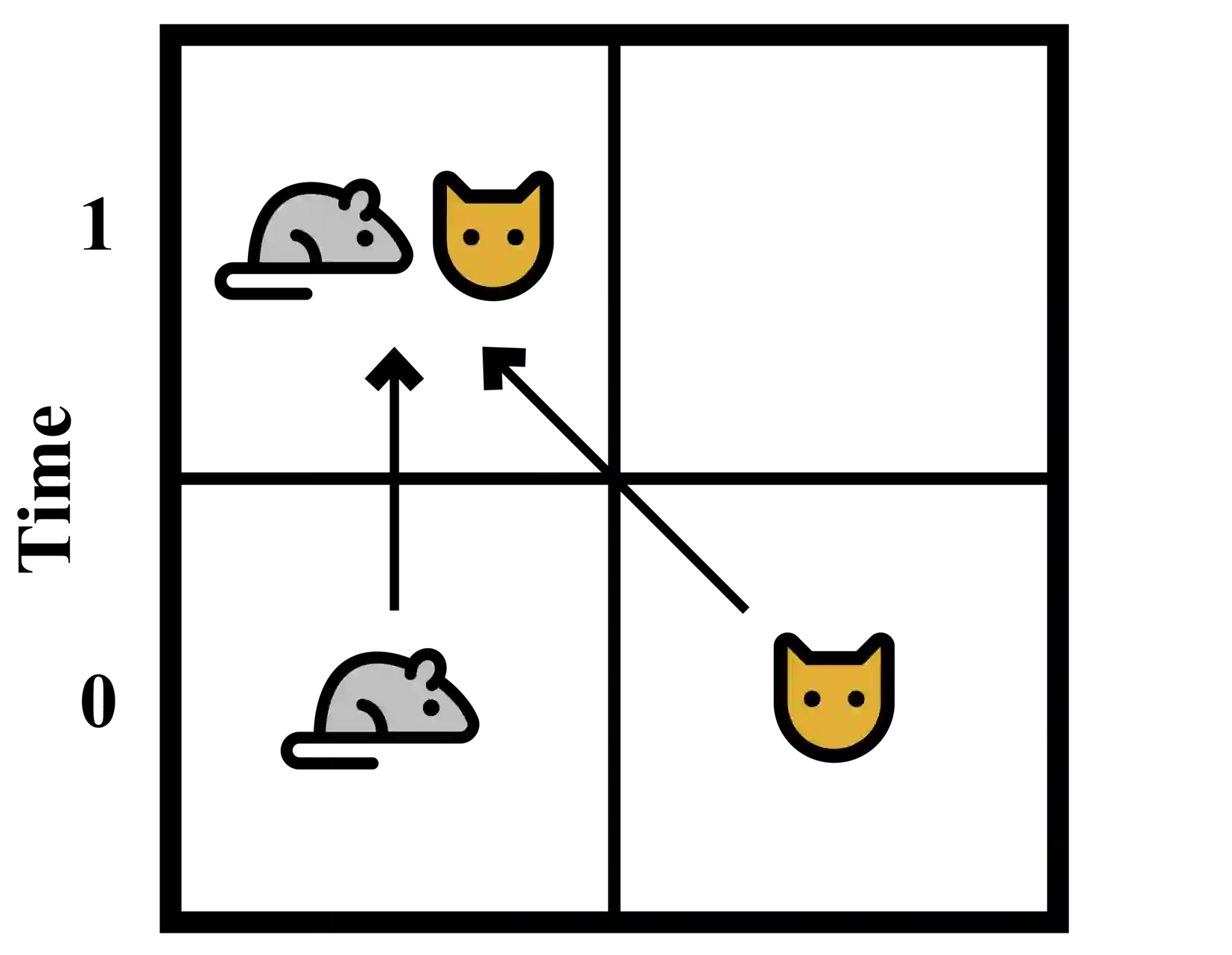
Every day, weather forecasting centres around the world make use of noisy, incomplete observations of the atmosphere to update their weather forecasts. This process is known as data assimilation, data fusion or state estimation and is best expressed as Bayesian inference: given a set of observations, some prior beliefs and a model of the target system, what is the probability distribution of some set of unobserved quantities or latent variables at some time, possibly in the future? While data assimilation has developed rapidly in some areas, relatively little progress has been made in performing data assimilation with agent-based models. This has hampered the use of agent-based models to make quantitative claims about real-world systems. Here we present an algorithm that uses Markov-Chain-Monte-Carlo methods to generate samples of the parameters and trajectories of an agent-based model over a window of time given a set of possibly noisy, aggregated and incomplete observations of the system. This can be used as-is, or as part of a data assimilation cycle or sequential-MCMC algorithm. Our algorithm is applicable to time-stepping, agent-based models whose agents have a finite set of states and a finite number of ways of acting on the world. As presented the algorithm is only practical for agents with a few bytes of internal state although we discuss ways of removing this restriction. We demonstrate the algorithm by performing data assimilation with an agent-based, spatial predator-prey model.
翻译:每天,世界各地的天气预报中心都利用对大气的噪音和不完全的观测来更新其天气预报。这一过程被称为数据同化、数据融合或状态估计,最好以巴伊西亚推论来表达:根据一套观察、一些先前的信念和目标系统的模型,某些未观测的数量或潜在变数的概率分布在某个时候,可能在未来?虽然数据同化在某些区域迅速发展,但在用代理商模型进行数据同化方面进展相对较少。这妨碍了使用基于代理商模型来对真实世界系统进行定量索赔。我们在这里提出了一个算法,利用Markov-Chain-Monte-Carlo方法在时间窗口中生成一个基于代理商模型参数和轨迹的样本,同时对系统进行一套可能很吵、综合和不完整的观测。这可以作为数据同级同级同级同级同级同级计算周期或按级和按级和按级同级计算法的一部分。我们的算法适用于时间跨越、基于代理商的模型,其代理商对现实世界系统有一定的定数,我们只用一种限制性的同级的同级算法来讨论。