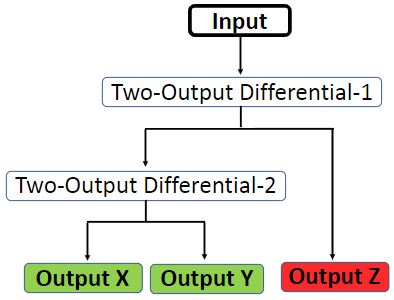
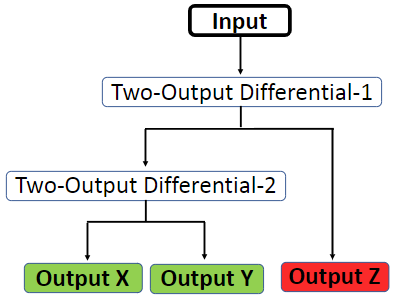
This paper presents the arrangement of an in-pipe climbing robot that works using a clever differential part to explore complex associations of lines. Standard wheeled/continued in-pipe climbing robots are leaned to slip and take while exploring in pipe turns. The mechanism helps in achieving the first eventual outcome of clearing out slip and drag in the robot tracks during development. The proposed differential comprehends the down to earth limits of the standard two-yield differential, which is cultivated the underlying time for a differential with three outcomes. The mechanism definitively changes the track paces of the robot considering the powers applied on each track inside the line association, by clearing out the prerequisite for any unique control. The entertainment of the robot crossing in the line network in different bearings and in pipe-turns without slip shows the proposed arrangement's ampleness.
翻译:本文展示了使用智能差分部分来探索复杂的线条组合的管道内攀爬机器人的安排。 标准轮式/ 连续管式攀爬机器人在钻管旋转时倾向于滑滑和取走。 机制有助于在开发过程中实现清除滑滑和拖动机器人轨道的最初最终结果。 提议的差分将标准双当量差差的底部时间缩小到地球极限, 使底部时间为差分培养为三个结果。 机制明确改变了机器人的轨道速度, 因为它考虑到线内每条轨道上应用的力量, 清除了任何独特控制的先决条件 。 机器人在线性网络中以不同轴承和无滑动的管道旋转的娱乐活动显示了拟议安排的充足性 。