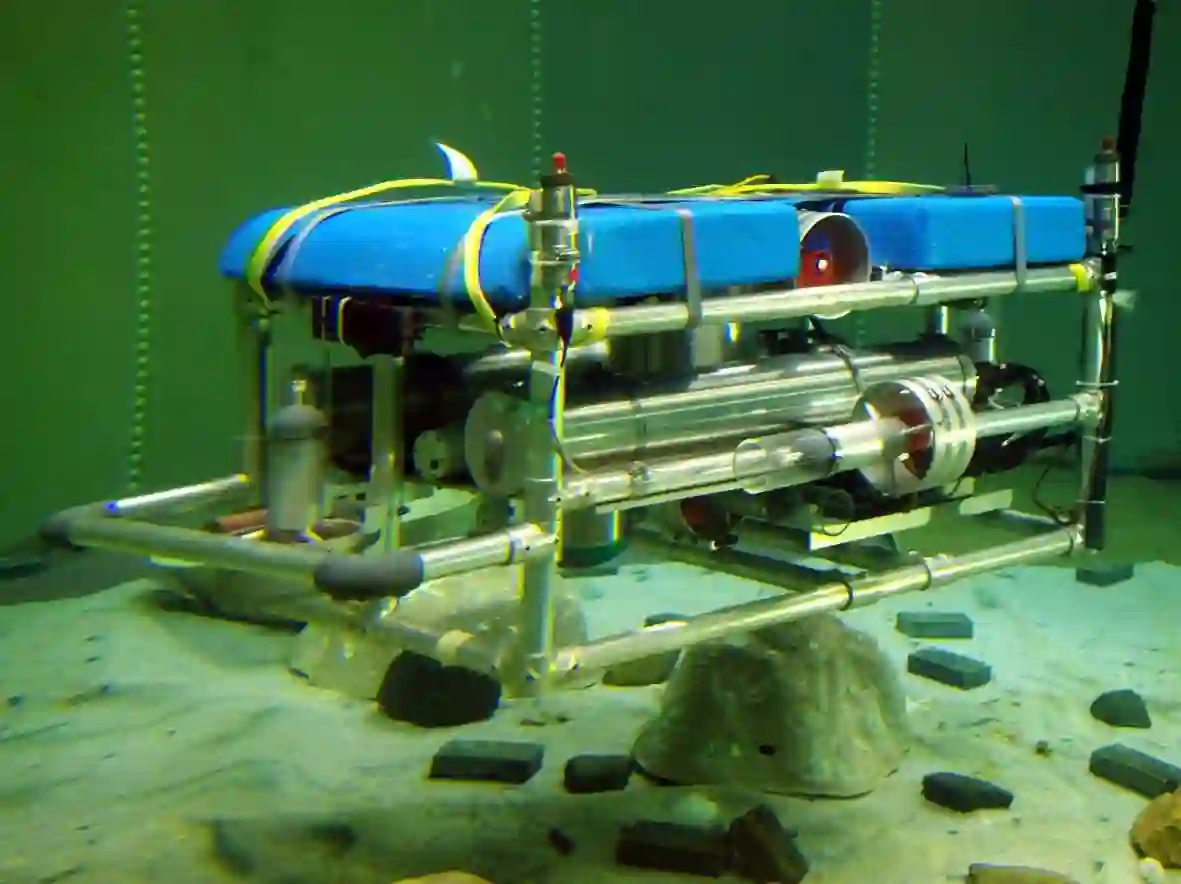
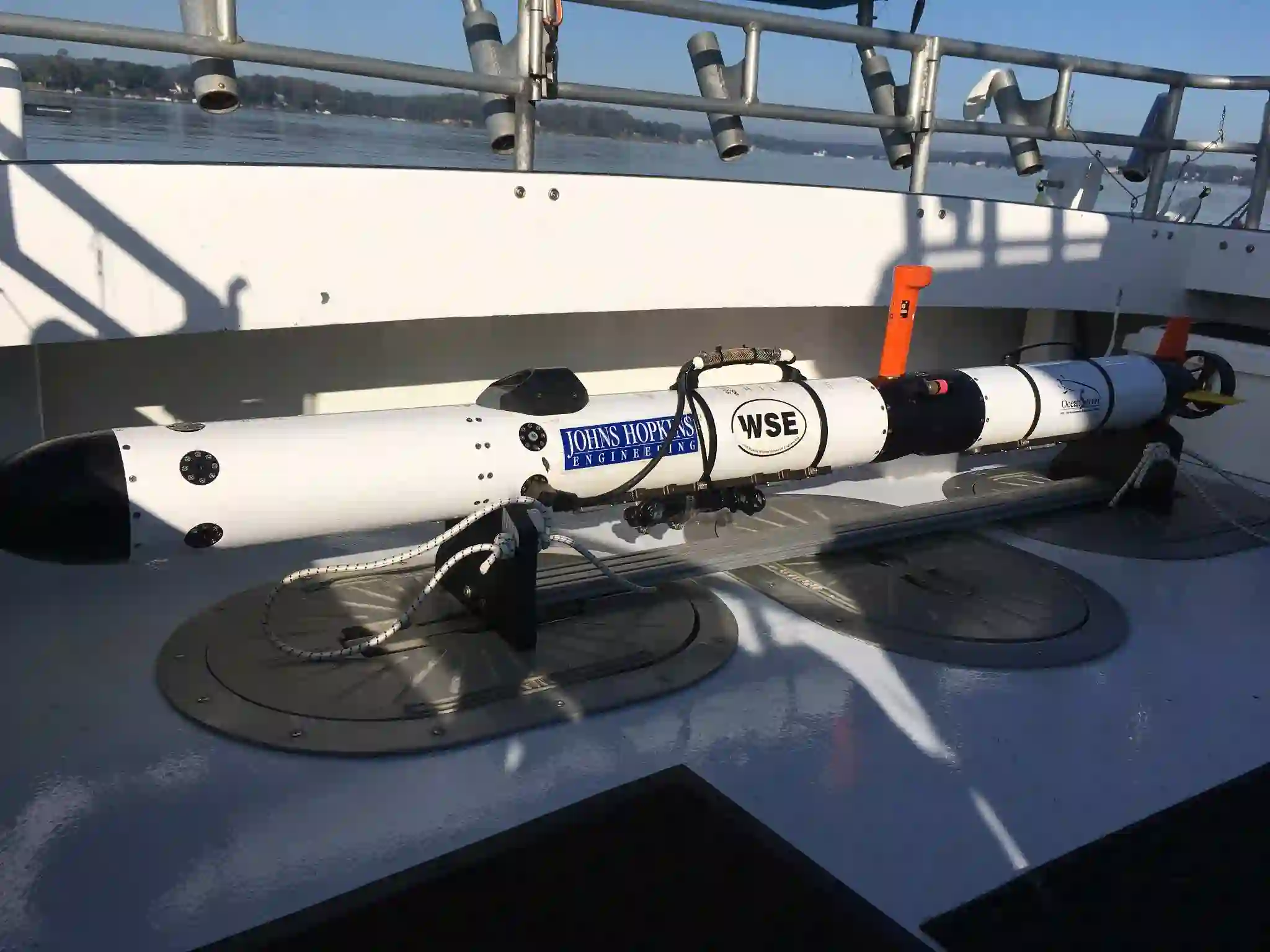
This article addresses the problem of dynamic on-line estimation and compensation of hard-iron and soft-iron biases of 3-axis magnetometers under dynamic motion in field robotics, utilizing only biased measurements from a 3-axis magnetometer and a 3-axis angular rate sensor. The proposed magnetometer and angular velocity bias estimator (MAVBE) utilizes a 15-state process model encoding the nonlinear process dynamics for the magnetometer signal subject to angular velocity excursions, while simultaneously estimating 9 magnetometer bias parameters and 3 angular rate sensor bias parameters, within an extended Kalman filter framework. Bias parameter local observability is numerically evaluated. The bias-compensated signals, together with 3-axis accelerometer signals, are utilized to estimate bias compensated magnetic geodetic heading. Performance of the proposed MAVBE method is evaluated in comparison to the widely cited magnetometer-only TWOSTEP method in numerical simulations, laboratory experiments, and full-scale field trials of an instrumented autonomous underwater vehicle in the Chesapeake Bay, MD, USA. For the proposed MAVBE, (i) instrument attitude is not required to estimate biases, and the results show that (ii) the biases are locally observable, (iii) the bias estimates converge rapidly to true bias parameters, (iv) only modest instrument excitation is required for bias estimate convergence, and (v) compensation for magnetometer hard-iron and soft-iron biases dramatically improves dynamic heading estimation accuracy.
翻译:本条涉及外地机器人动态运动下3轴磁强计3轴磁强计动态线上估计和补偿硬铁和软铁偏差的问题,仅使用3轴磁强计和3轴角速度传感器的偏差测量。拟议的磁强计和角速度偏差测深仪(MAVBE)使用15州进程模型,将受角速度偏差影响的磁强仪信号的非线性进程动态编码起来,同时在延长的卡尔曼过滤框架内,同时估计9磁强偏差参数和3个角速感应传感器偏差参数。Bias参数当地可观察性经过数字评估。偏差校准信号加上3轴电动加速计信号用来估计偏差补偿磁度的测深方向。对MAVBE方法的性能进行了评估,与在数字模拟、实验室实验中广泛引用的仅使用2STEEEEP的磁力计方法进行非线性进程,同时同时在延长的卡尔曼过滤框架中,同时估计9个磁强计偏差值偏差参数和3个角测测深器传感器偏差参数参数参数。B参数的局部可观察性进行了数值评估。 偏差信号校准信号测量测测测测测测测测测测测测值,对切萨湾、MMD、美国和直度(AAAAVAF的精确度的精确度,要求的精确度估测测测度,对当地的估值为:MAB结果的精确度为要求的精确度,对当地的精确度的测程的估为:精确度,对当地的估值的估测算为:MAV的精确性估测度,对当地的估测度,对当地的估度,对当地的估值为要求的精确度,对当地的精确度,对地的估测算为:精确度,对地的估值为:精确度,对地的估,对地的估,对地性,对地的估测算为:对地的估测算为:精确性,对地的估测度,对地的估度,对地的估测度是的估程的估程的估的估程的估程的估程的估测程的估程的估程的估程的估为:MAAVAV