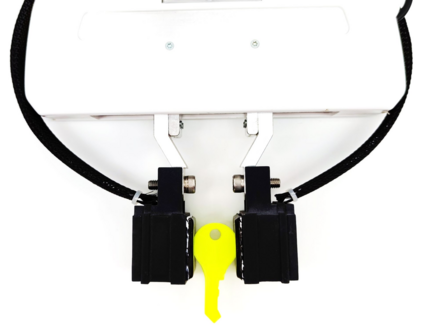
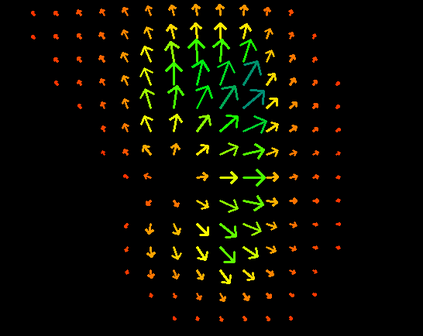
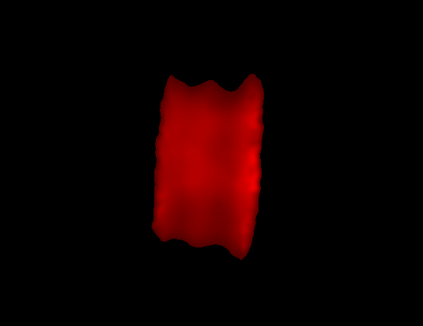
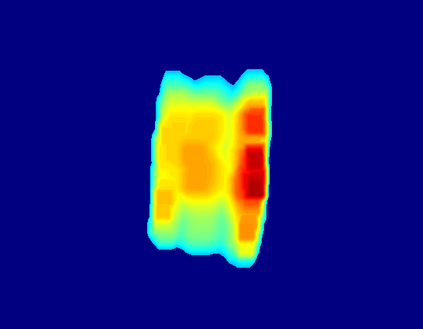
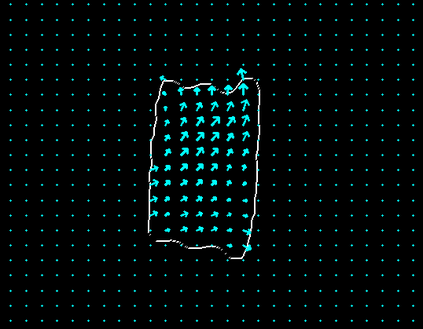
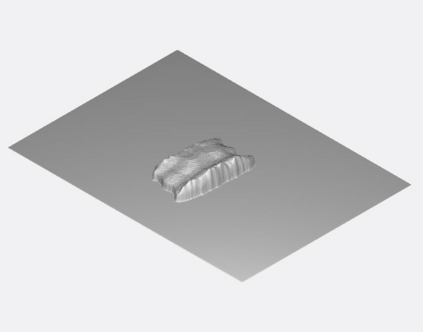
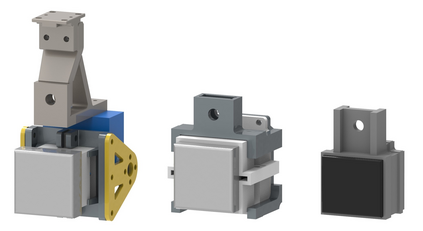
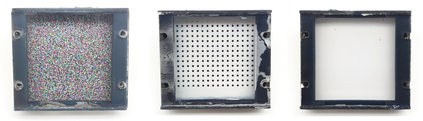
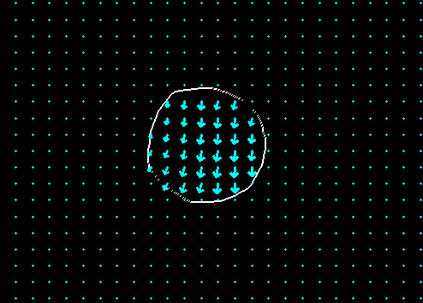
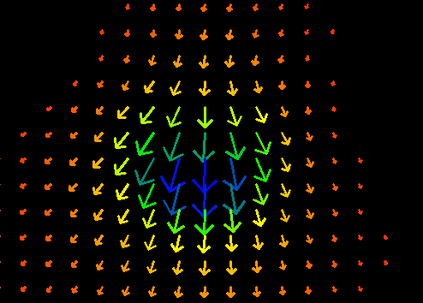
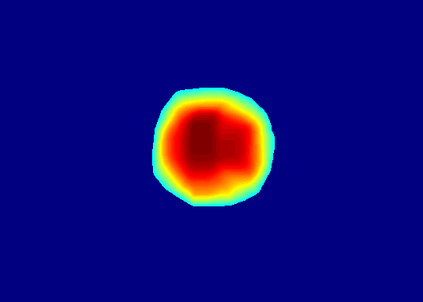
Tactile sensing is an essential perception for robots to complete dexterous tasks. As a promising tactile sensing technique, vision-based tactile sensors have been developed to improve robot manipulation performance. Here we propose a new design of our vision-based tactile sensor, DelTact, with its high-resolution sensing abilities of multiple modality surface contact information. The sensor adopts an improved dense random color pattern based on previous version, using a modular hardware architecture to achieve higher accuracy of contact deformation tracking whilst at the same time maintaining a compact and robust overall design. In particular, we optimized the color pattern generation process and selected the appropriate pattern for coordinating with a dense optical flow in a real-world experimental sensory setting using varied contact objects. A dense tactile flow was obtained from the raw image in order to determine shape and force distribution on the contact surface. This sensor can be easily integrated with a parallel gripper where experimental results using qualitative and quantitative analysis demonstrated that the sensor is capable of providing tactile measurements with high temporal and spatial resolution.
翻译:触觉感测是机器人完成极差任务的基本感知。 作为一种很有希望的触觉感测技术, 已经开发了基于视觉的触觉感应器, 以改善机器人操纵性能。 我们在这里提出了我们基于视觉的触觉感应器的新设计, 即 DelTact, 其高分辨率感测能力为多模式地表接触信息。 感应器采用基于先前版本的更密集随机色谱模式, 使用模块化硬件结构来提高接触变异跟踪的准确性, 同时保持紧凑和稳健的总体设计 。 特别是, 我们优化了颜色模式生成过程, 并选择了合适的模式, 用于在现实世界实验感官设置中使用不同接触对象来协调密集的光学流 。 从原始图像中获取了密度的触觉流, 以便确定接触表面的形状和强度分布 。 这个感应器很容易与平行的控制器结合, 使用定性和定量分析的实验结果显示传感器能够提供高时空分辨率的触觉测量。