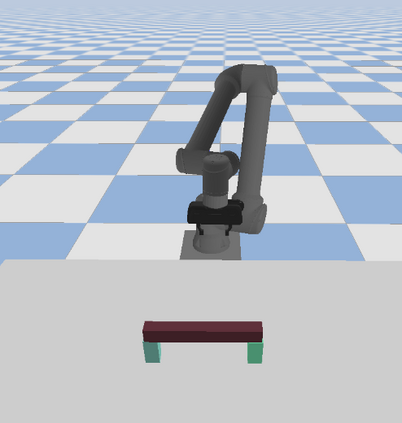
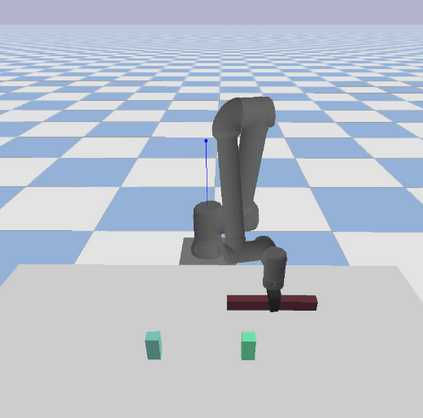
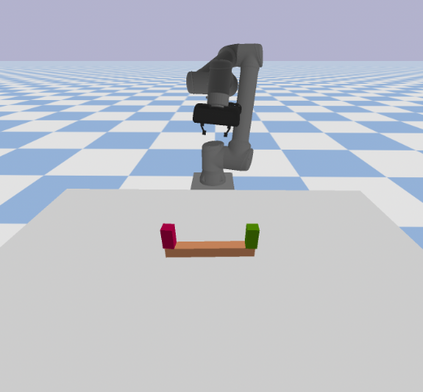
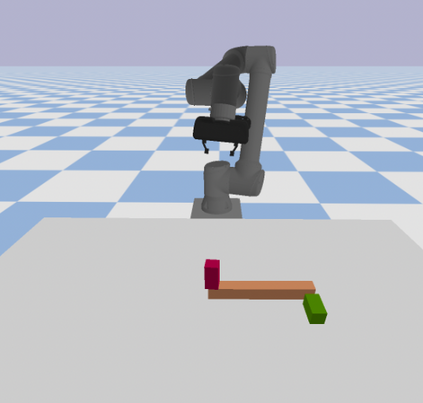
In this paper, we propose a concept learning architecture that enables a robot to build symbols through self-exploration by interacting with a varying number of objects. Our aim is to allow a robot to learn concepts without constraints, such as a fixed number of interacted objects or pre-defined symbolic structures. As such, the sought architecture should be able to build symbols for objects such as single objects that can be grasped, object stacks that cannot be grasped together, or other composite dynamic structures. Towards this end, we propose a novel architecture, a self-attentive predictive encoder-decoder network with binary activation layers. We show the validity of the proposed network through a robotic manipulation setup involving a varying number of rigid objects. The continuous sensorimotor experience of the robot is used by the proposed network to form effect predictors and symbolic structures that describe the interaction of the robot in a discrete way. We showed that the robot acquired reasoning capabilities to encode interaction dynamics of a varying number of objects in different configurations using the discovered symbols. For example, the robot could reason that (possible multiple numbers of) objects on top of another object would move together if the object below is moved by the robot. We also showed that the discovered symbols can be used for planning to reach goals by training a higher-level neural network that makes pure symbolic reasoning.
翻译:在本文中, 我们提出一个概念学习架构, 使机器人能够通过与不同数量的天体互动, 通过自我探索来构建符号。 我们的目标是允许机器人不受限制地学习概念, 比如固定数量的互动对象或预定义的象征性结构。 因此, 所寻求的架构应该能够为单个天体等能够被捕捉的天体、 无法一起捕捉的天体堆或其他复合动态结构等天体建立符号。 为此, 我们提议了一个新结构, 一个带有二进制激活层的自惯性预测编码- 解码网络。 我们的目标是通过机器人操纵设置来显示所提议网络的有效性, 包括不同数量的僵硬天体。 所拟议的网络的连续感官体验应该用来形成预测和符号结构, 用来以离散的方式描述机器人的相互作用。 我们展示了机器人获得的逻辑能力, 用所发现的符号来将不同组合的不同天体的不同天体的相互作用动态编码。 例如, 机器人可以解释为什么( 可能的多个数) 由机器人操纵的天体组成的网络顶部的天体结构结构会使所发现的一个纯粹目标在下面移动。