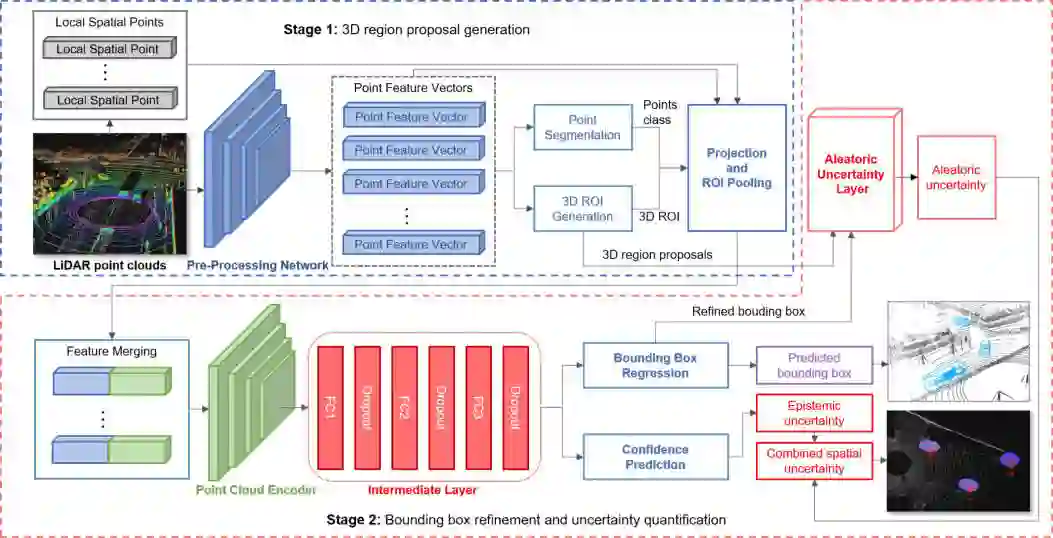
Uncertainties in Deep Neural Network (DNN)-based perception and vehicle's motion pose challenges to the development of safe autonomous driving vehicles. In this paper, we propose a safe motion planning framework featuring the quantification and propagation of DNN-based perception uncertainties and motion uncertainties. Contributions of this work are twofold: (1) A Bayesian Deep Neural network model which detects 3D objects and quantitatively captures the associated aleatoric and epistemic uncertainties of DNNs; (2) An uncertainty-aware motion planning algorithm (PU-RRT) that accounts for uncertainties in object detection and ego-vehicle's motion. The proposed approaches are validated via simulated complex scenarios built in CARLA. Experimental results show that the proposed motion planning scheme can cope with uncertainties of DNN-based perception and vehicle motion, and improve the operational safety of autonomous vehicles while still achieving desirable efficiency.
翻译:深神经网络(DNN)基于深神经网络(DNN)的认知和车辆运动的不确定性对发展安全的自主驾驶车辆提出了挑战,在本文件中,我们提议了一个安全运动规划框架,以量化和推广基于DNN的认知不确定性和运动不确定性,这项工作的贡献是两方面的:(1) 巴伊西亚深神经网络模型,该模型检测到三维对象,定量捕捉DNN的相关偏执性和感性不确定性;(2) 不确定性运动规划算法,该算出物体探测和自我车辆运动的不确定性;拟议方法通过CARLA的模拟复杂情景得到验证。 实验结果表明,拟议的运动规划计划可以应对基于DNN的认知和车辆运动的不确定性,提高自主车辆的操作安全性,同时仍实现理想的效率。