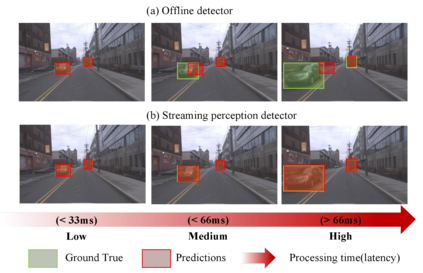
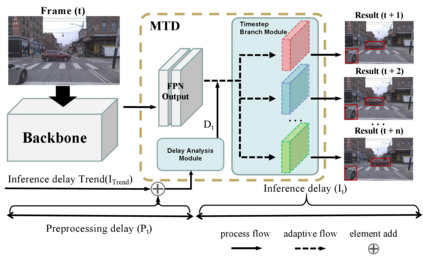
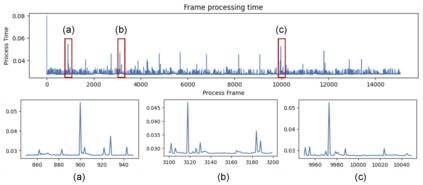
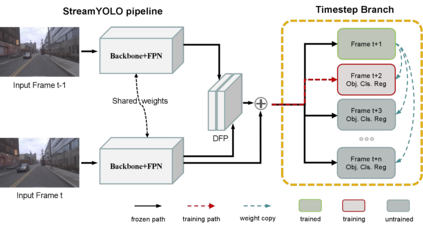
Autonomous driving systems require real-time environmental perception to ensure user safety and experience. Streaming perception is a task of reporting the current state of the world, which is used to evaluate the delay and accuracy of autonomous driving systems. In real-world applications, factors such as hardware limitations and high temperatures inevitably cause delays in autonomous driving systems, resulting in the offset between the model output and the world state. In order to solve this problem, this paper propose the Multi- Timestep Detector (MTD), an end-to-end detector which uses dynamic routing for multi-branch future prediction, giving model the ability to resist delay fluctuations. A Delay Analysis Module (DAM) is proposed to optimize the existing delay sensing method, continuously monitoring the model inference stack and calculating the delay trend. Moreover, a novel Timestep Branch Module (TBM) is constructed, which includes static flow and adaptive flow to adaptively predict specific timesteps according to the delay trend. The proposed method has been evaluated on the Argoverse-HD dataset, and the experimental results show that it has achieved state-of-the-art performance across various delay settings.
翻译:暂无翻译