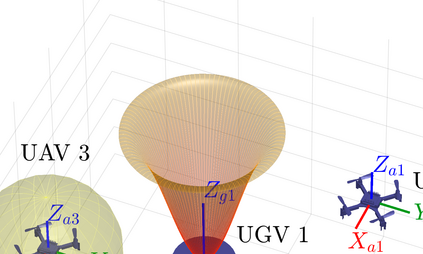
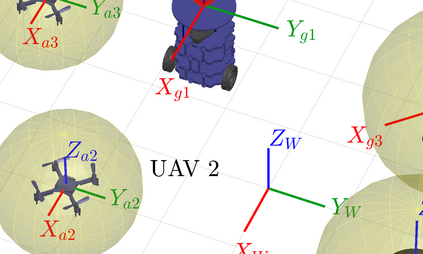
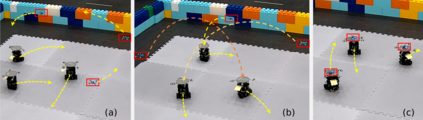
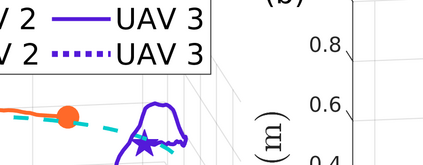
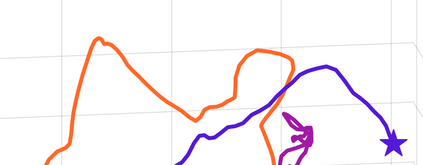
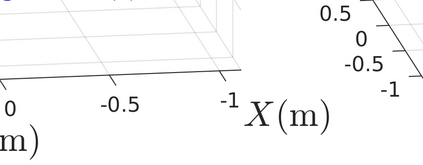
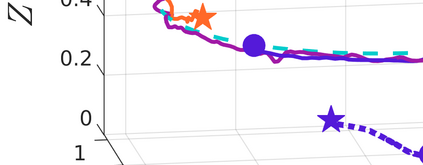
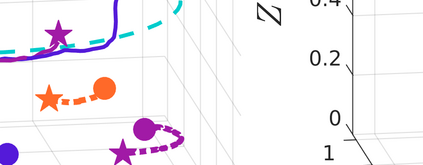
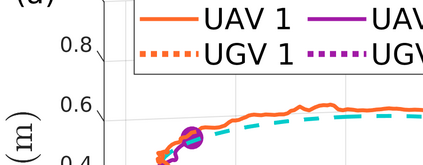
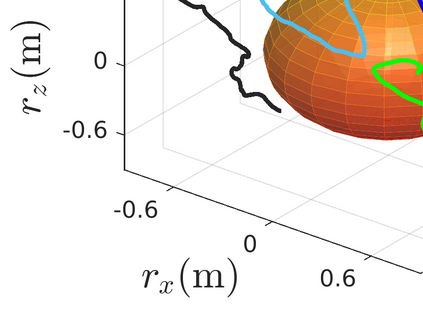
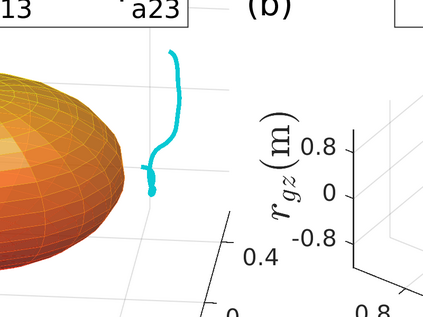
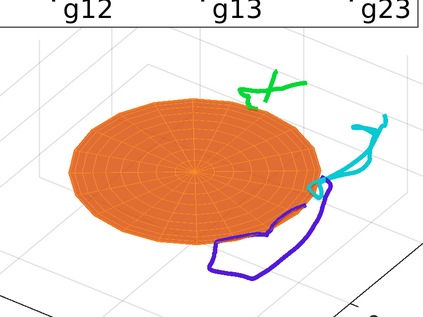
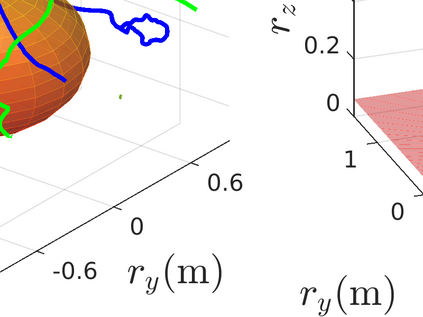
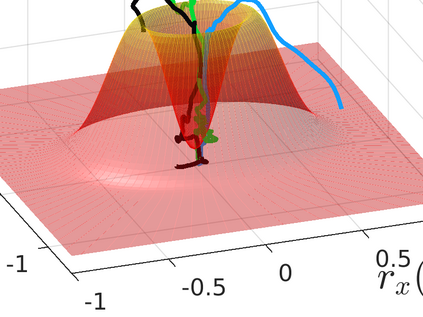
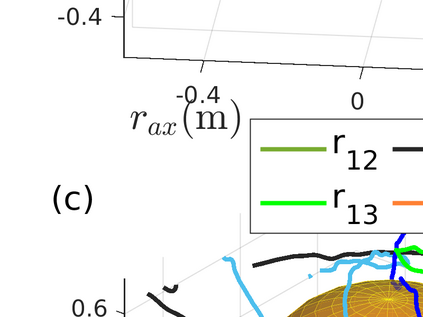
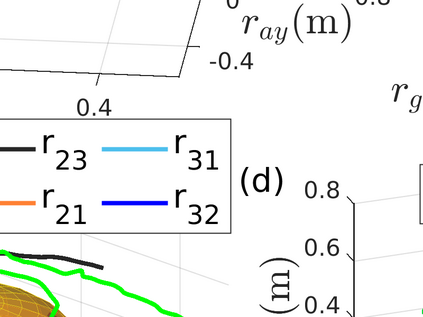
In this article, we address the problem of designing a scalable control architecture for a safe coordinated operation of a multi-agent system with aerial (UAVs) and ground robots (UGVs) in a confined task space. The proposed method uses Control Barrier Functions (CBFs) to impose constraints associated with (i) collision avoidance between agents, (ii) landing of UAVs on mobile UGVs, and (iii) task space restriction. Further, to account for the rapid increase in the number of constraints for a single agent with the increasing number of agents, the proposed architecture uses a centralized-decentralized Edge cluster, where a centralized node (Watcher) activates the relevant constraints, reducing the need for high onboard processing and network complexity. The distributed nodes run the controller locally to overcome latency and network issues. The proposed Edge architecture is experimentally validated using multiple aerial and ground robots in a confined environment performing a coordinated operation.
翻译:暂无翻译