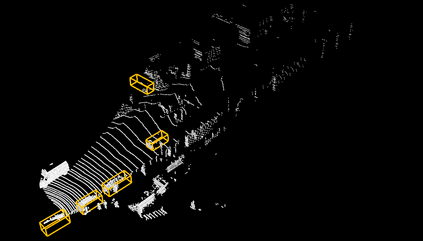
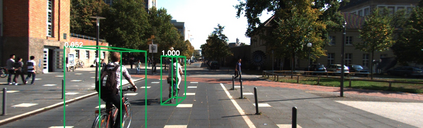
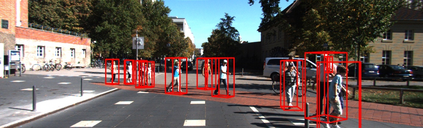
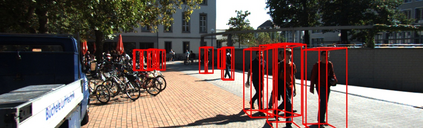
We present a novel 3D object detection framework, named IPOD, based on raw point cloud. It seeds object proposal for each point, which is the basic element. This paradigm provides us with high recall and high fidelity of information, leading to a suitable way to process point cloud data. We design an end-to-end trainable architecture, where features of all points within a proposal are extracted from the backbone network and achieve a proposal feature for final bounding inference. These features with both context information and precise point cloud coordinates yield improved performance. We conduct experiments on KITTI dataset, evaluating our performance in terms of 3D object detection, Bird's Eye View (BEV) detection and 2D object detection. Our method accomplishes new state-of-the-art , showing great advantage on the hard set.
翻译:我们以原始点云为基础,提出了一个名为IPOD的新颖的3D天体探测框架,以原始点云为基础,它为每个点点的天体建议播种,这是基本要素。这一范例为我们提供了高记和高忠诚度的信息,从而提供了处理点云数据的合适方法。我们设计了一个端到端的可训练结构,在这个结构中,一个建议中的所有点的特征都从主干网中提取出来,并取得了最终捆绑推断的建议特征。这些带有上下文信息和精确点云坐标的特征都会提高性能。我们在KITTI数据集上进行了实验,从3D天体探测、鸟眼视探测和2D天体探测的角度评价了我们的性能。我们的方法在硬件上取得了巨大的优势。