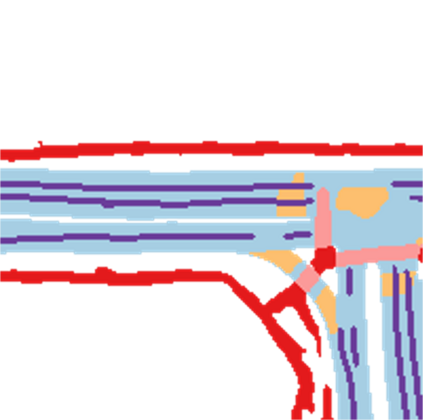
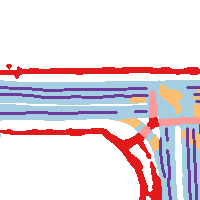
Despite tremendous advancements in bird's-eye view (BEV) perception, existing models fall short in generating realistic and coherent semantic map layouts, and they fail to account for uncertainties arising from partial sensor information (such as occlusion or limited coverage). In this work, we introduce MapPrior, a novel BEV perception framework that combines a traditional discriminative BEV perception model with a learned generative model for semantic map layouts. Our MapPrior delivers predictions with better accuracy, realism, and uncertainty awareness. We evaluate our model on the large-scale nuScenes benchmark. At the time of submission, MapPrior outperforms the strongest competing method, with significantly improved MMD and ECE scores in camera- and LiDAR-based BEV perception.
翻译:暂无翻译