
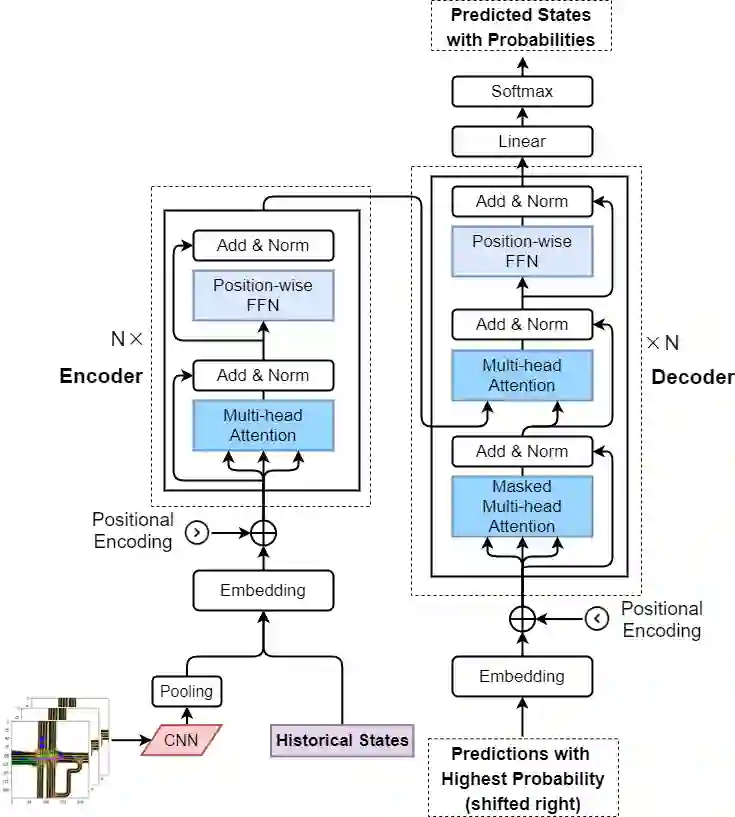
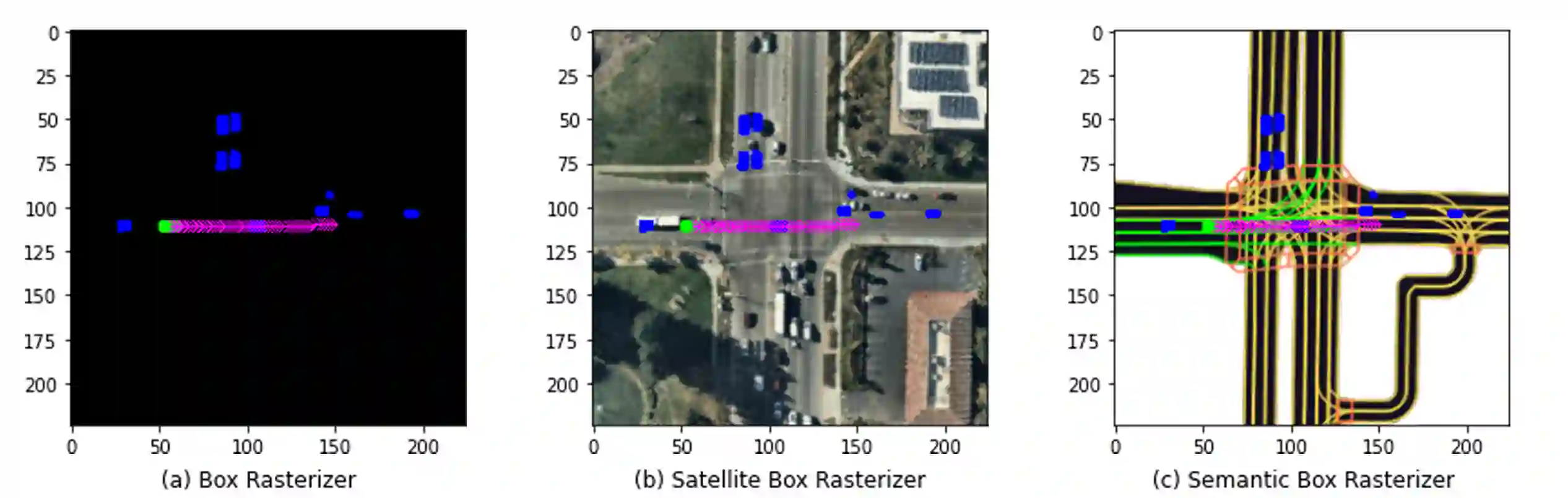
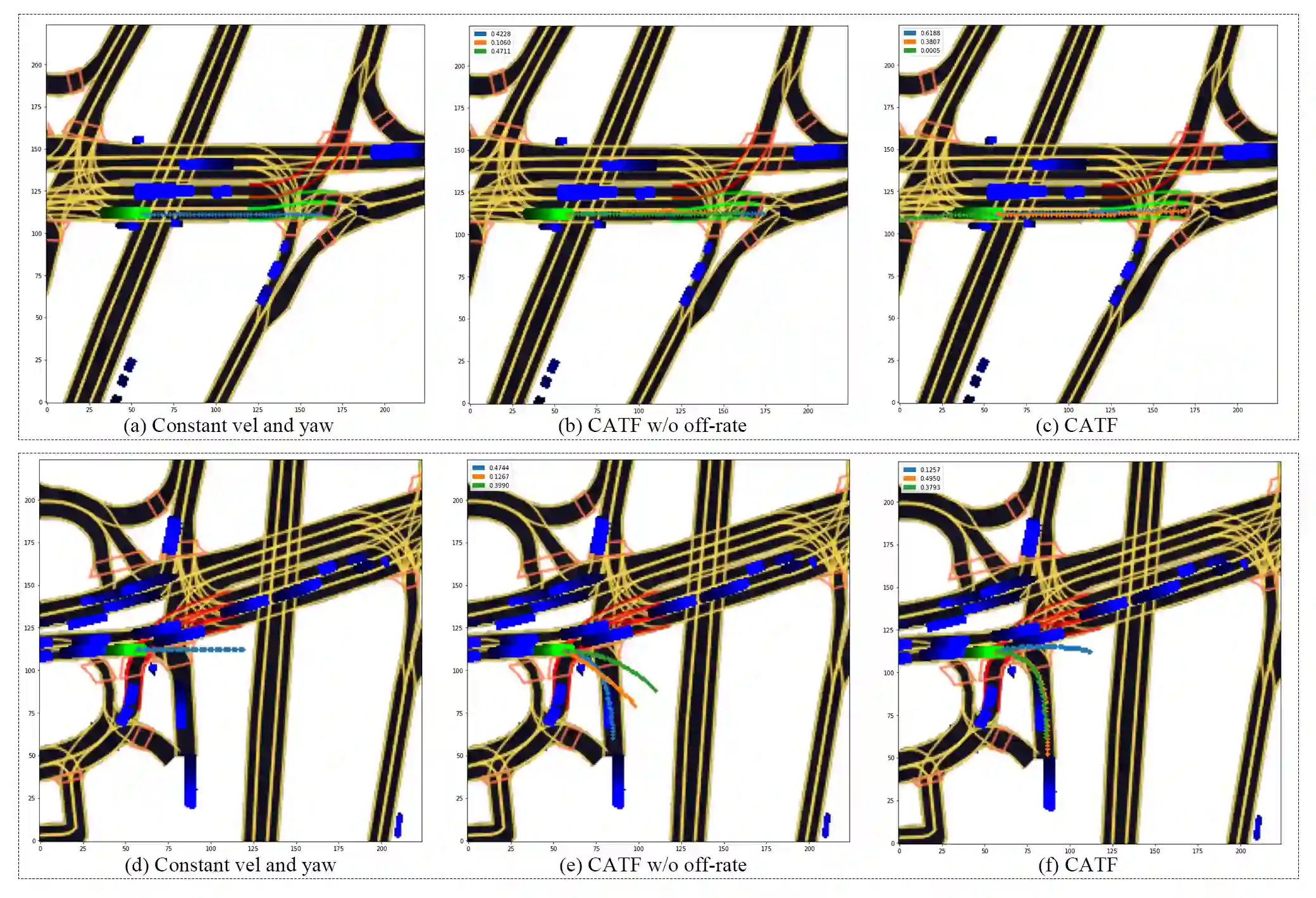
Predicting the trajectories of surrounding agents is still considered one of the most challenging tasks for autonomous driving. In this paper, we introduce a multi-modal trajectory prediction framework based on the transformer network. The semantic maps of each agent are used as inputs to convolutional networks to automatically derive relevant contextual information. A novel auxiliary loss that penalizes unfeasible off-road predictions is also proposed in this study. Experiments on the Lyft l5kit dataset show that the proposed model achieves state-of-the-art performance, substantially improving the accuracy and feasibility of the prediction outcomes.
翻译:暂无翻译

相关内容

Networking:IFIP International Conferences on Networking。
Explanation:国际网络会议。
Publisher:IFIP。
SIT: http://dblp.uni-trier.de/db/conf/networking/index.html
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
Arxiv
22+阅读 · 2022年9月14日
Arxiv
17+阅读 · 2021年3月19日
Arxiv
13+阅读 · 2018年1月18日


相关VIP内容
专知会员服务
34+阅读 · 2019年10月18日
专知会员服务
36+阅读 · 2019年10月17日
相关资讯