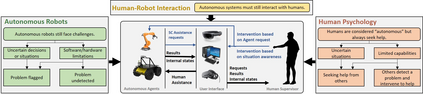
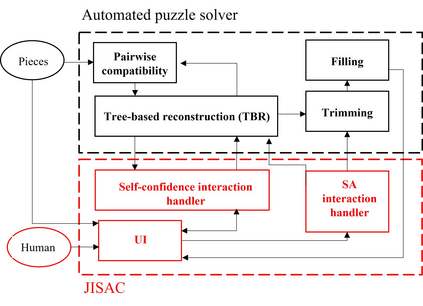
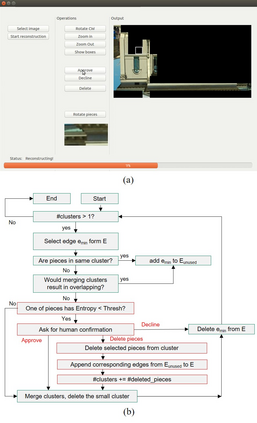
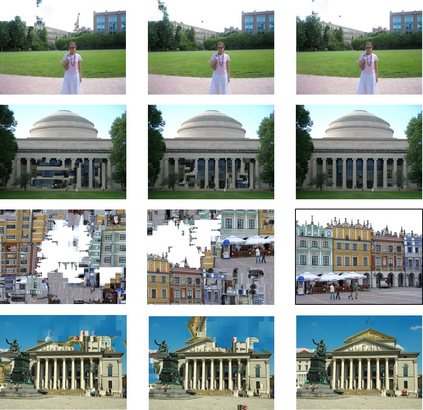
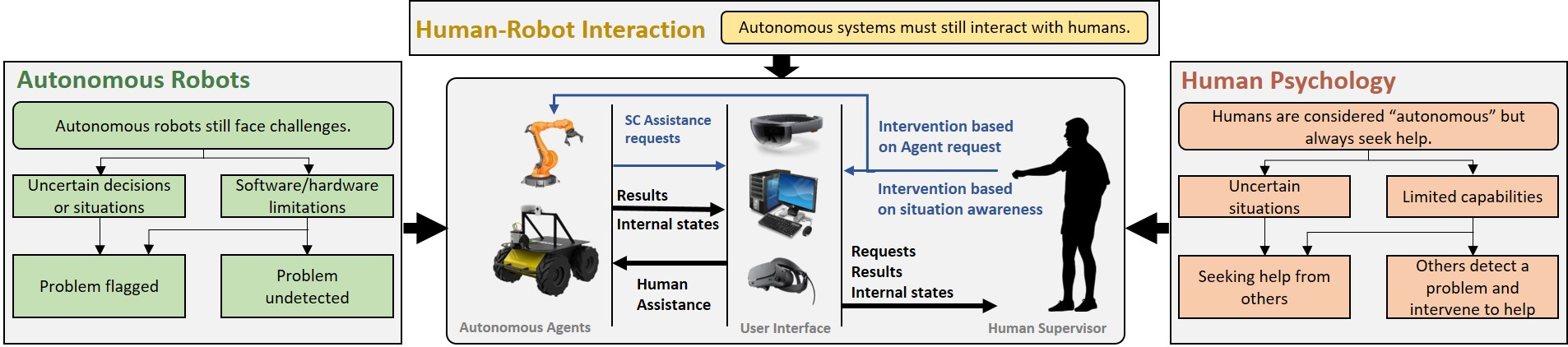
In this paper, we propose and validate a Joint-Initiative Supervised Autonomy (JISA) framework for Human-Robot Interaction (HRI), in which a robot maintains a measure of its self-confidence (SC) while performing a task, and only prompts the human supervisor for help when its SC drops. At the same time, during task execution, a human supervisor can intervene in the task being performed, based on his/her Situation Awareness (SA). To evaluate the applicability and utility of JISA, it is implemented on two different HRI tasks: grid-based collaborative simultaneous localization and mapping (SLAM) and automated jigsaw puzzle reconstruction. Augmented Reality (AR) (for SLAM) and two-dimensional graphical user interfaces (GUI) (for puzzle reconstruction) are custom-designed to enhance human SA and allow intuitive interaction between the human and the agent. The superiority of the JISA framework is demonstrated in experiments. In SLAM, the superior maps produced by JISA preclude the need for post processing of any SLAM stock maps; furthermore, JISA reduces the required mapping time by approximately 50 percent versus traditional approaches. In automated puzzle reconstruction, the JISA framework outperforms both fully autonomous solutions, as well as those resulting from on-demand human intervention prompted by the agent.
翻译:在本文件中,我们提出并验证了人类机器人互动联合监督自主(JISA)框架(JISA),其中机器人在执行任务时保持了一定程度的自信心(SC),只有在其SC下降时才能促使人监督员提供帮助。与此同时,在执行任务执行期间,人监督员可以根据自己/她的情况认识(SA),干预正在履行的任务。为了评价JISA的适用性和实用性,它在两个不同的HRI任务上实施:基于网络的合作本地化和绘图(SLAM)和自动拼图重建。增强现实(AR)和二维图形用户界面(GUI)(用于拼图重建)是定制的,目的是加强人类的SA,并允许人与代理人之间的直觉互动。在实验中展示了JISA框架的优越性。在SISA中,JISA制作的高级地图排除了处理SLM库存地图(SAM)和自动拼图(jigsaw拼图)和自动拼图(SLAM)的需要;此外,JperISA将所需的绘图时间减少约50%左右的50%,而不是传统的自动干涉框架。