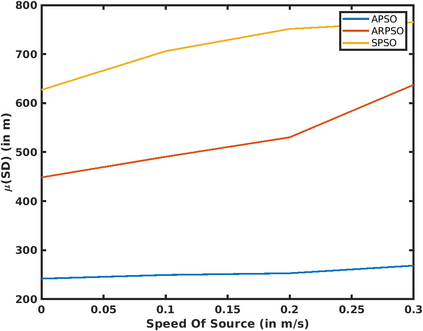
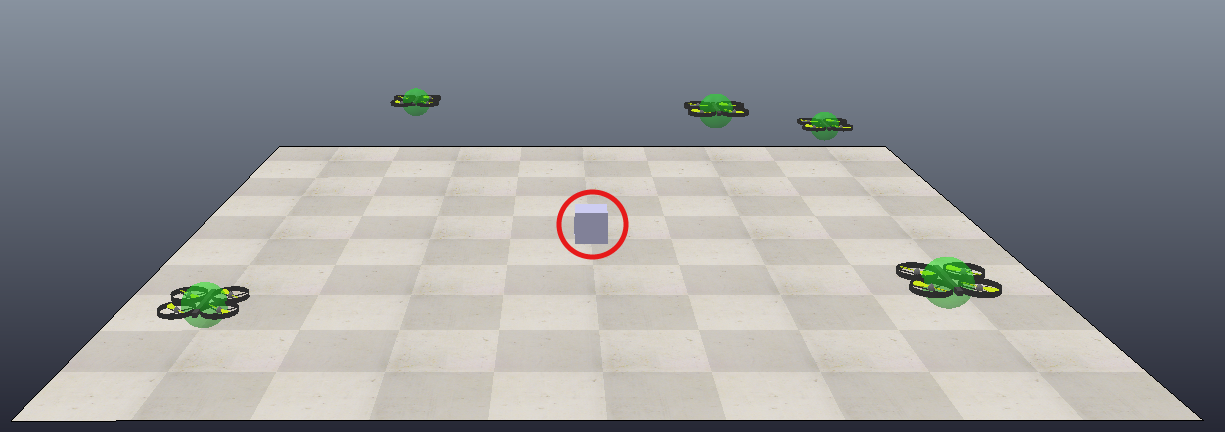
This paper presents a novel algorithm for a swarm of unmanned aerial vehicles (UAVs) to search for an unknown source. The proposed method is inspired by the well-known PSO algorithm and is called acceleration-based particle swarm optimization (APSO) to address the source-seeking problem with no a priori information. Unlike the conventional PSO algorithm, where the particle velocity is updated based on the self-cognition and social-cognition information, here the update is performed on the particle acceleration. A theoretical analysis is provided, showing the stability and convergence of the proposed APSO algorithm. Conditions on the parameters of the resulting third order update equations are obtained using Jurys stability test. High fidelity simulations performed in CoppeliaSim, shows the improved performance of the proposed APSO algorithm for searching an unknown source when compared with the state-of-the-art particle swarm-based source seeking algorithms. From the obtained results, it is observed that the proposed method performs better than the existing methods under scenarios like different inter-UAV communication network topologies, varying number of UAVs in the swarm, different sizes of search region, restricted source movement and in the presence of measurements noise.
翻译:本文介绍了用于寻找未知来源的无人驾驶飞行器群集的新型算法。 提议的方法受众所周知的 PSO 算法的启发, 被称为加速基础粒子群集优化( APSO), 以解决源寻求问题, 没有先验信息。 与传统的 PSO 算法不同, 粒子速度是根据自我认知和社会认知信息更新的, 这是粒子加速度的更新。 提供了理论分析, 显示了拟议的APSO 算法的稳定性和趋同性。 由此产生的第三次顺序更新方程式参数的条件是使用Jurys稳定性测试获得的。 在 CoppeliaSim 中进行的高度忠诚模拟显示, 拟议的 APSO 算法在搜索未知源方面表现的改进, 与最先进的粒子群群求算法相比。 从所获得的结果来看, 所拟议的方法比现有方法表现得更好, 如不同的 UAVSOW通信网络顶部, 不同数量不同, 战争地区限制测量的UAVS值搜索源。