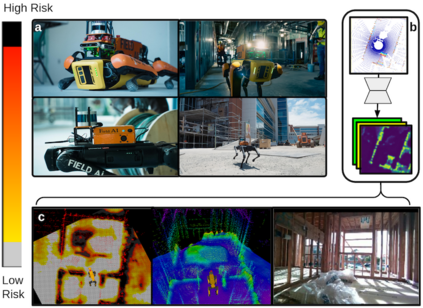
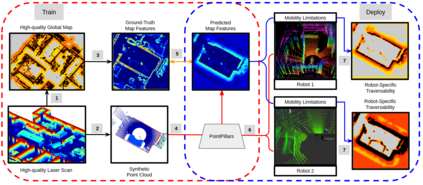
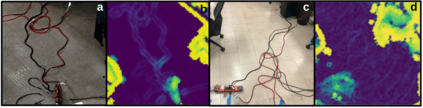
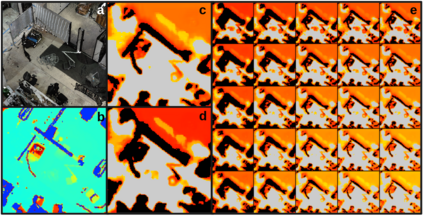
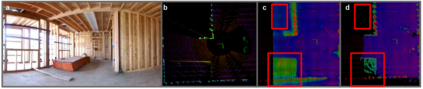
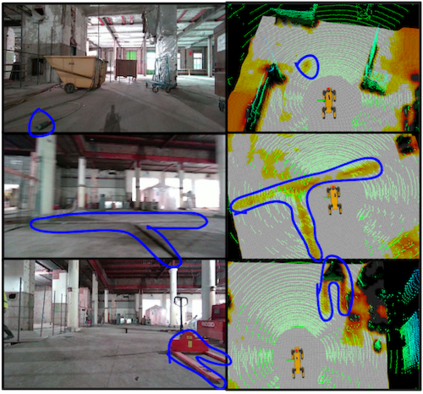
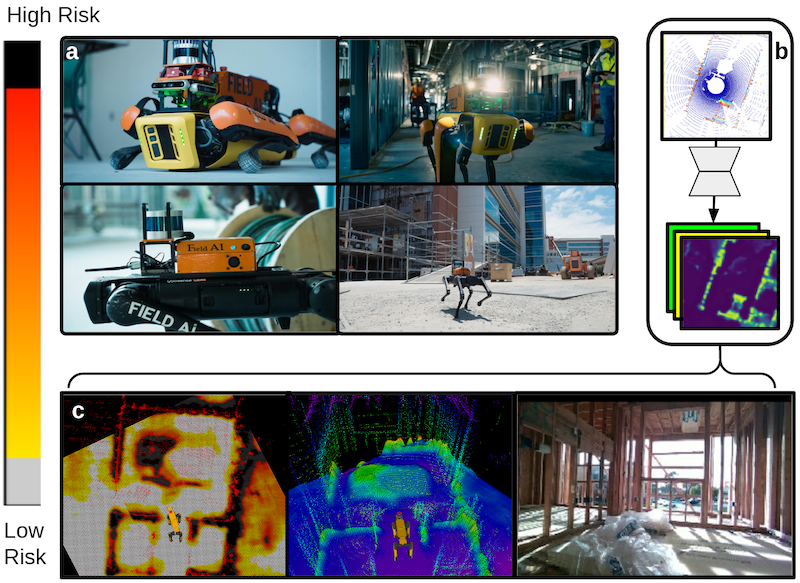
Traversability estimation in rugged, unstructured environments remains a challenging problem in field robotics. Often, the need for precise, accurate traversability estimation is in direct opposition to the limited sensing and compute capability present on affordable, small-scale mobile robots. To address this issue, we present a novel method to learn [u]ncertainty-aware [n]avigation features from high-fidelity scans of [real]-world environments (UNRealNet). This network can be deployed on-robot to predict these high-fidelity features using input from lower-quality sensors. UNRealNet predicts dense, metric-space features directly from single-frame lidar scans, thus reducing the effects of occlusion and odometry error. Our approach is label-free, and is able to produce traversability estimates that are robot-agnostic. Additionally, we can leverage UNRealNet's predictive uncertainty to both produce risk-aware traversability estimates, and refine our feature predictions over time. We find that our method outperforms traditional local mapping and inpainting baselines by up to 40%, and demonstrate its efficacy on multiple legged platforms.
翻译:暂无翻译