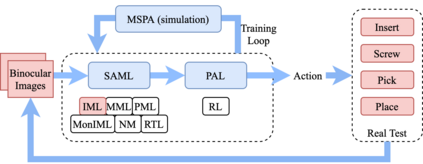
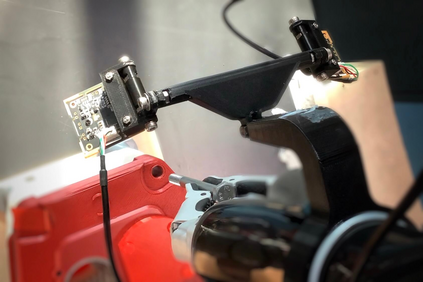
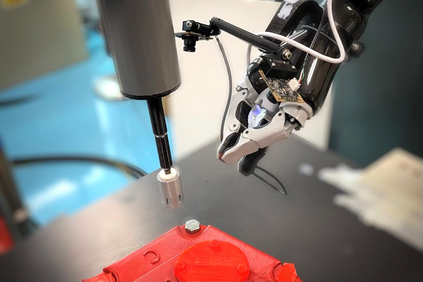
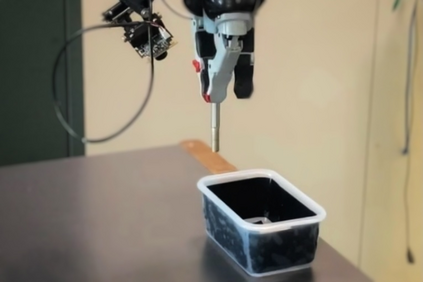
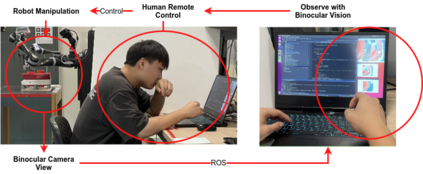
Precision robotic manipulation tasks (insertion, screwing, precisely pick, precisely place) are required in many scenarios. Previous methods achieved good performance on such manipulation tasks. However, such methods typically require tedious calibration or expensive sensors. 3D/RGB-D cameras and torque/force sensors add to the cost of the robotic application and may not always be economical. In this work, we aim to solve these but using only weak-calibrated and low-cost webcams. We propose Binocular Alignment Learning (BAL), which could automatically learn the eye-hand coordination and points alignment capabilities to solve the four tasks. Our work focuses on working with unknown eye-hand coordination and proposes different ways of performing eye-in-hand camera calibration automatically. The algorithm was trained in simulation and used a practical pipeline to achieve sim2real and test it on the real robot. Our method achieves a competitively good result with minimal cost on the four tasks.
翻译:精密机器人操作任务(安插、操弄、精选、精选、精选)在许多情形中都是需要的。以往的方法在这些操作任务上取得了良好的表现。然而,这些方法通常需要枯燥的校准或昂贵的传感器。 3D/RGB-D相机和托克/力感应器增加了机器人应用的成本,而且不一定经济。在这项工作中,我们的目标是解决这些问题,但只使用微弱的校准和低成本的网络摄像头。我们建议Binoclocal Conflication (BAL), 它可以自动学习眼-手协调和点对齐能力来解决这四项任务。我们的工作重点是用未知的眼-手协调来工作,并提出自动进行眼-手摄影校准的不同方法。算法是模拟培训,使用实用管道来达到模真,对真正的机器人进行测试。我们的方法在四项任务上取得了竞争良好的效果,成本最低。