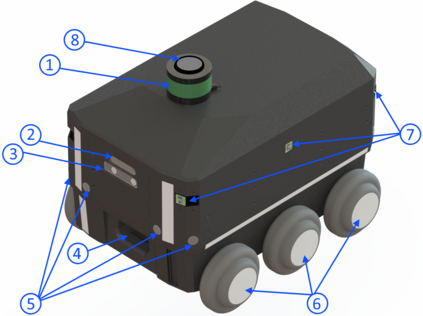
Mobile autonomous robots include numerous sensors for environment perception. Cameras are an essential tool for robot's localization, navigation, and obstacle avoidance. To process a large flow of data from the sensors, it is necessary to optimize algorithms, or to utilize substantial computational power. In our work, we propose an algorithm for optimizing a neural network for object detection using preliminary binary frame classification. An autonomous outdoor mobile robot with 6 rolling-shutter cameras on the perimeter providing a 360-degree field of view was used as the experimental setup. The obtained experimental results revealed that the proposed optimization accelerates the inference time of the neural network in the cases with up to 5 out of 6 cameras containing target objects.
翻译:移动自主机器人包括许多环境感知传感器。 相机是机器人定位、导航和避免障碍的基本工具。 为了处理来自传感器的大量数据流,有必要优化算法,或者利用大量的计算能力。 在我们的工作中,我们提议了一种算法,用于利用初步二元框架分类优化天体探测的神经网络。 一个在周边提供360度观察场的自动户外移动机器人使用了6个滚动式照相机作为实验设置。 获得的实验结果显示,拟议的优化加速了神经网络的推论时间,在装有目标物体的6个摄像头中,最多有5个。