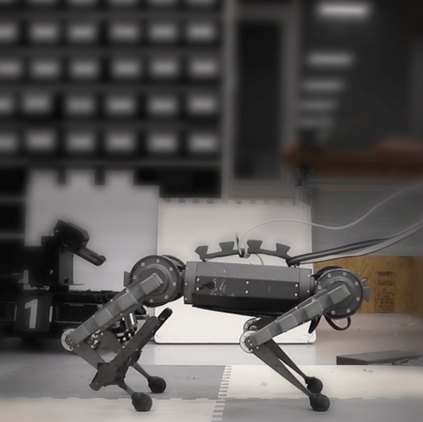
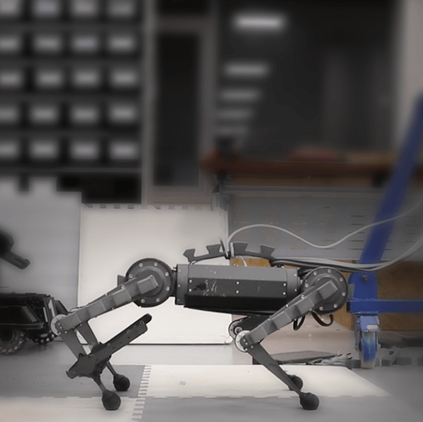
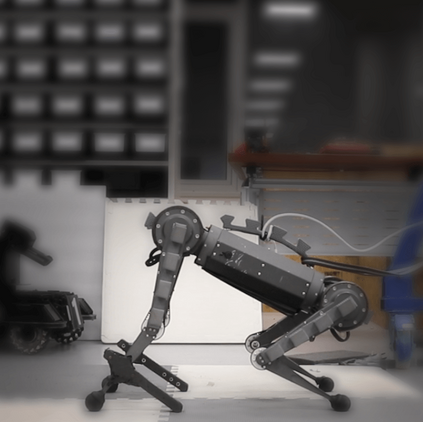
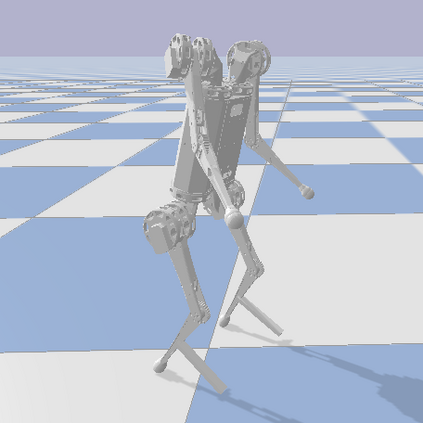
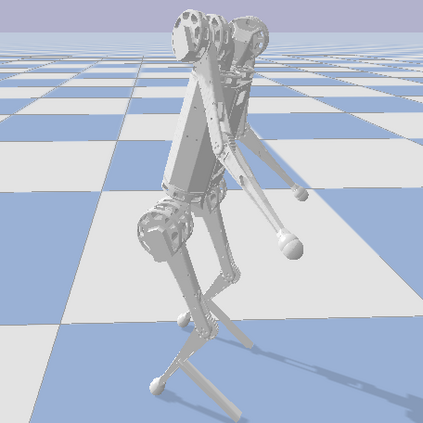
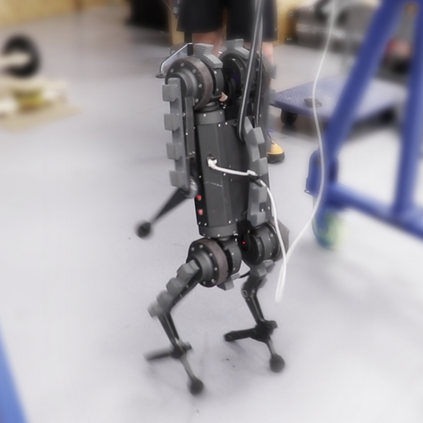
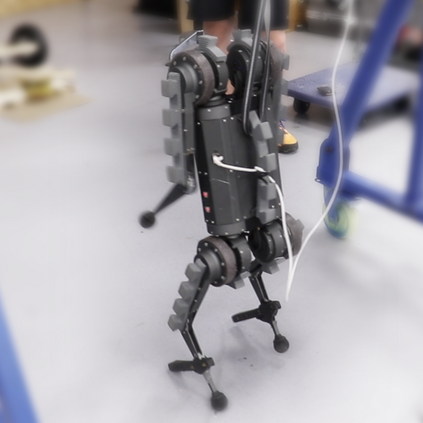
While quadruped robots usually have good stability and load capacity, bipedal robots offer a higher level of flexibility / adaptability to different tasks and environments. A multi-modal legged robot can take the best of both worlds. In this paper, we propose a multi-modal locomotion framework that is composed of a hand-crafted transition motion and a learning-based bipedal controller -- learnt by a novel algorithm called Automated Residual Reinforcement Learning. This framework aims to endow arbitrary quadruped robots with the ability to walk bipedally. In particular, we 1) design an additional supporting structure for a quadruped robot and a sequential multi-modal transition strategy; 2) propose a novel class of Reinforcement Learning algorithms for bipedal control and evaluate their performances in both simulation and the real world. Experimental results show that our proposed algorithms have the best performance in simulation and maintain a good performance in a real-world robot. Overall, our multi-modal robot could successfully switch between biped and quadruped, and walk in both modes. Experiment videos and code are available at https://chenaah.github.io/multimodal/.
翻译:虽然四重机器人通常具有良好的稳定性和负载能力,但双腿机器人为不同任务和环境提供了更高程度的灵活性/适应性。 多式断腿机器人可以采取两种世界的最佳方法。在本文中,我们提议一个多式移动控制框架,由手工制作的过渡运动和学习型双向控制器组成,由名为自动残存强化学习的新型算法所学习。这个框架的目的是让四重任意机器人以双向行走能力。特别是,我们1)为四重机器人和连续多式过渡战略设计一个额外的支持结构;2)提出新型的强化学习算法,用于双向控制并评价其在模拟和现实世界中的性能。实验结果表明,我们提议的算法在模拟方面表现最好,在现实世界机器人中保持良好的性能。总体而言,我们的多式机器人可以成功地在双向和四重行走之间转换,同时以两种模式行走。实验性视频和代码可在 https://chenchamala/mutimalubjio.