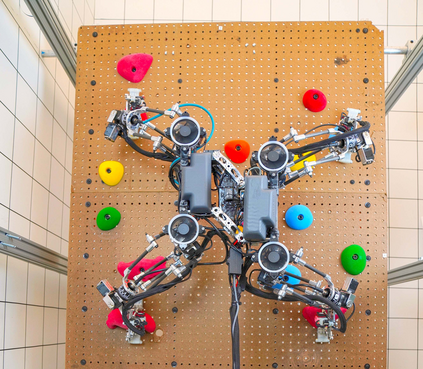
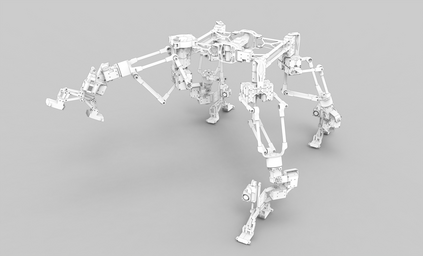
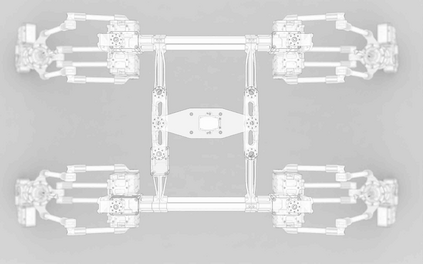
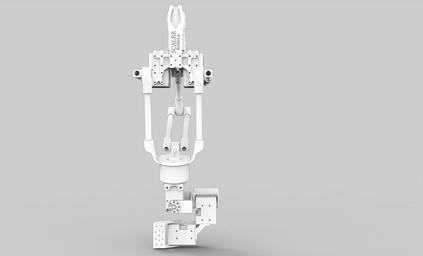
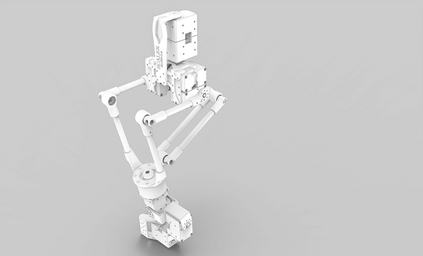
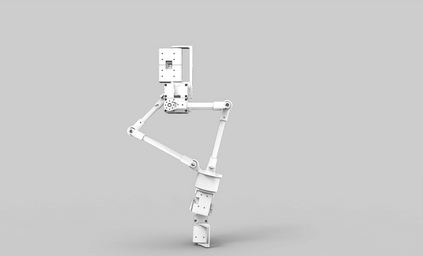
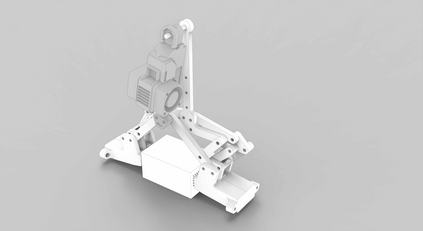
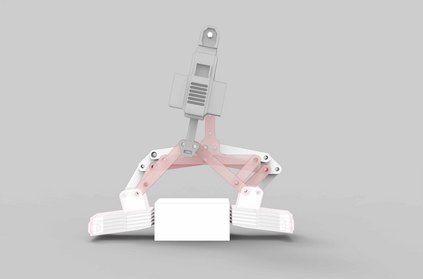
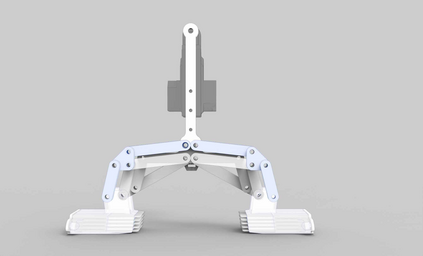
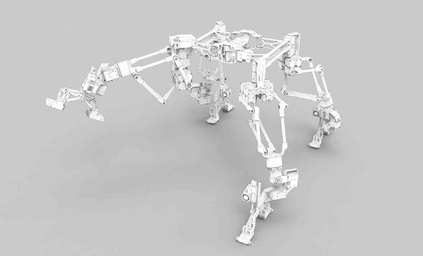
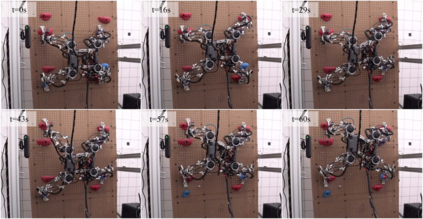
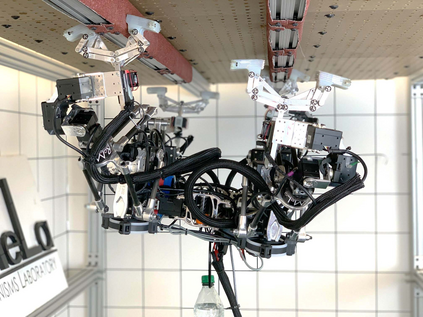
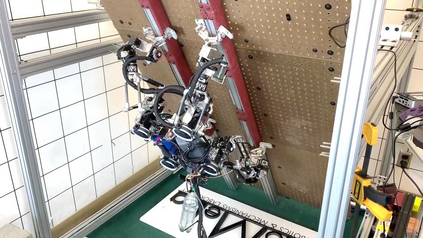
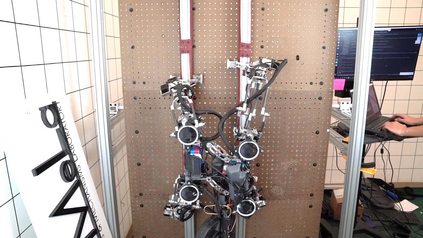
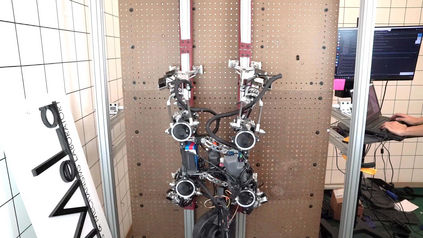
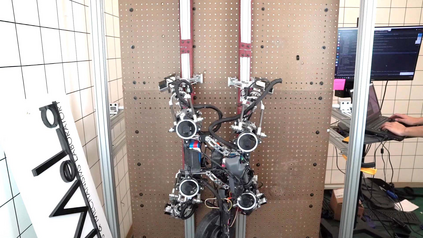
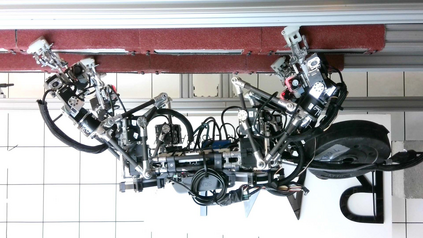
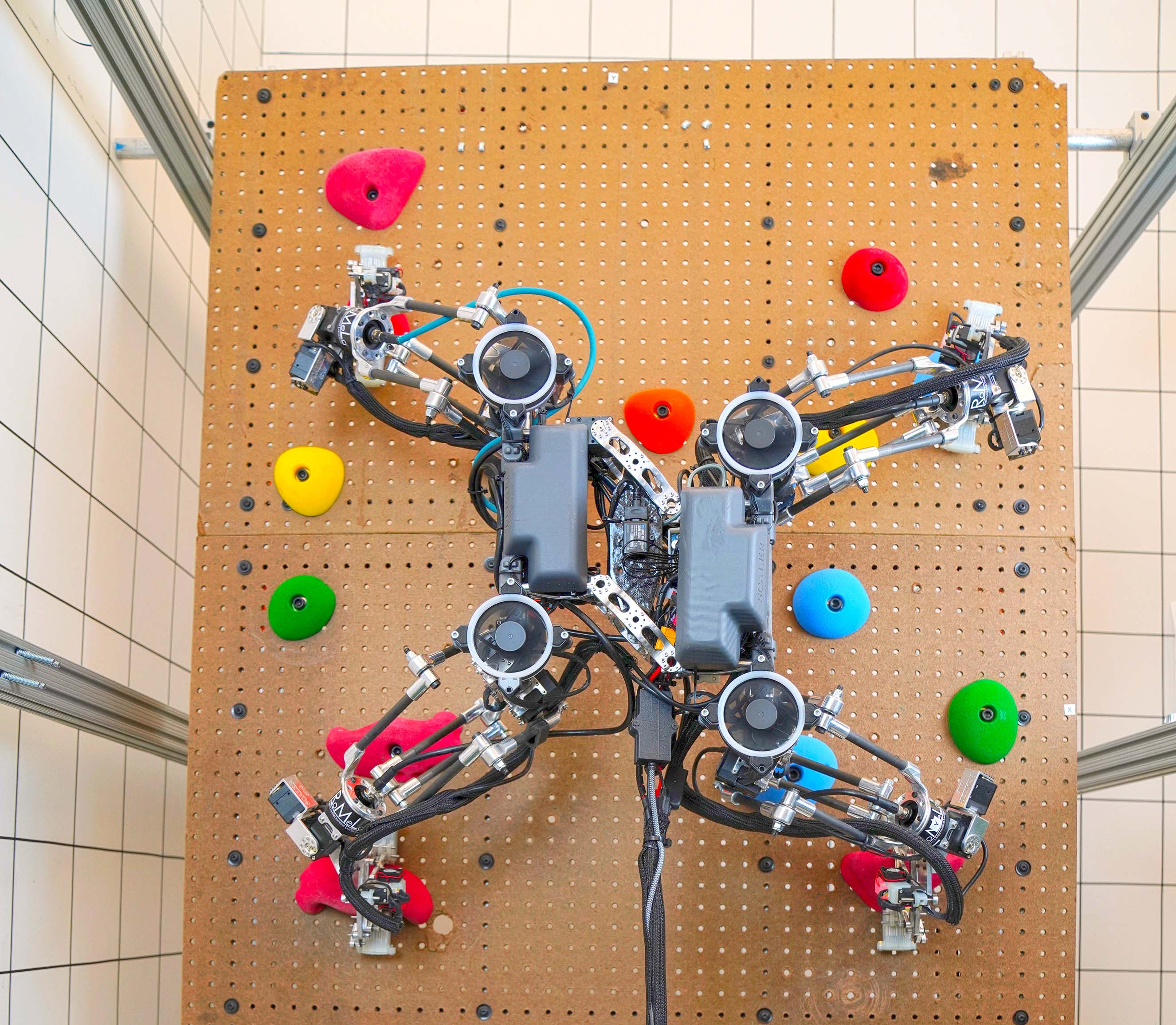
This paper introduces SCALER, a quadrupedal robot that demonstrates climbing on bouldering walls, overhangs, and ceilings and trotting on the ground. SCALER is one of the first high-degrees of freedom four-limbed robots that can free-climb under the Earth's gravity and one of the most mechanically efficient quadrupeds on the ground. Where other state-of-the-art climbers are specialized in climbing itself, SCALER promises practical free-climbing with payload \textit{and} ground locomotion, which realizes true versatile mobility. A new climbing gait, SKATE gait, increases the payload by utilizing the SCALER body linkage mechanism. SCALER achieves a maximum normalized locomotion speed of $1.87$ /s, or $0.56$ m/s on the ground and $1.0$ /min, or $0.35$ m/min in bouldering wall climbing. Payload capacity reaches $233$ % of the SCALER weight on the ground and $35$ % on the vertical wall. Our GOAT gripper, a mechanically adaptable underactuated two-finger gripper, successfully grasps convex and non-convex objects and supports SCALER.
翻译:本文介绍 SCALER 。 SCALER 是第一个在地球重力下可以自由升起的四升自由机器人高水平的四升机器人之一,也是地面上最机械高效的四倍机器人之一。 在其他最先进的登山者专门从事攀爬工作的地方, SCALER 承诺以有效载荷/ textit{和} 地面移动方式进行实际的免费攀爬, 实现真正的多功能机动性。 新的爬杆, SKATE 运动, 利用 SCALER 身体连接机制增加有效载荷。 SCALER 实现最大正常升降速度18.7美元/秒, 或地面上最大机械效率为0.56美元/秒, 在攀爬墙时为1.0美元/分钟, 或0. 35美元/分钟。 装载能力在地面上达到 SCALER 重量的233 %, 在地面上达到35美元 。 我们的GOAT SCA-CON 和硬性硬性墙上, 成功支持了两张硬的硬的硬的硬的硬墙。